Inspiration: We didn’t want to build another robot that just follows a line like it’s locked onto a track. Those work, but they’re kind of boring to watch. We wanted something that felt more alive: a robot that adjusted, reacted, and moved with a bit of personality. The idea came from downhill skiing: the way skiers carve side to side rather than moving straight down. That’s where Team Ski Bot came from. Our goal was to build a robot that doesn’t just follow a path, but skis along it.
What it does: Ski Bot is an edge-following robot that sticks to the right side of a track instead of sitting directly on top of it. It uses a TCS3200 color sensor to tell the difference between the colored boundary and the white/cardboard floor. When it detects red or color, it turns right to stay close to the edge. By constantly moving right, the robot naturally zigzags along the boundary.
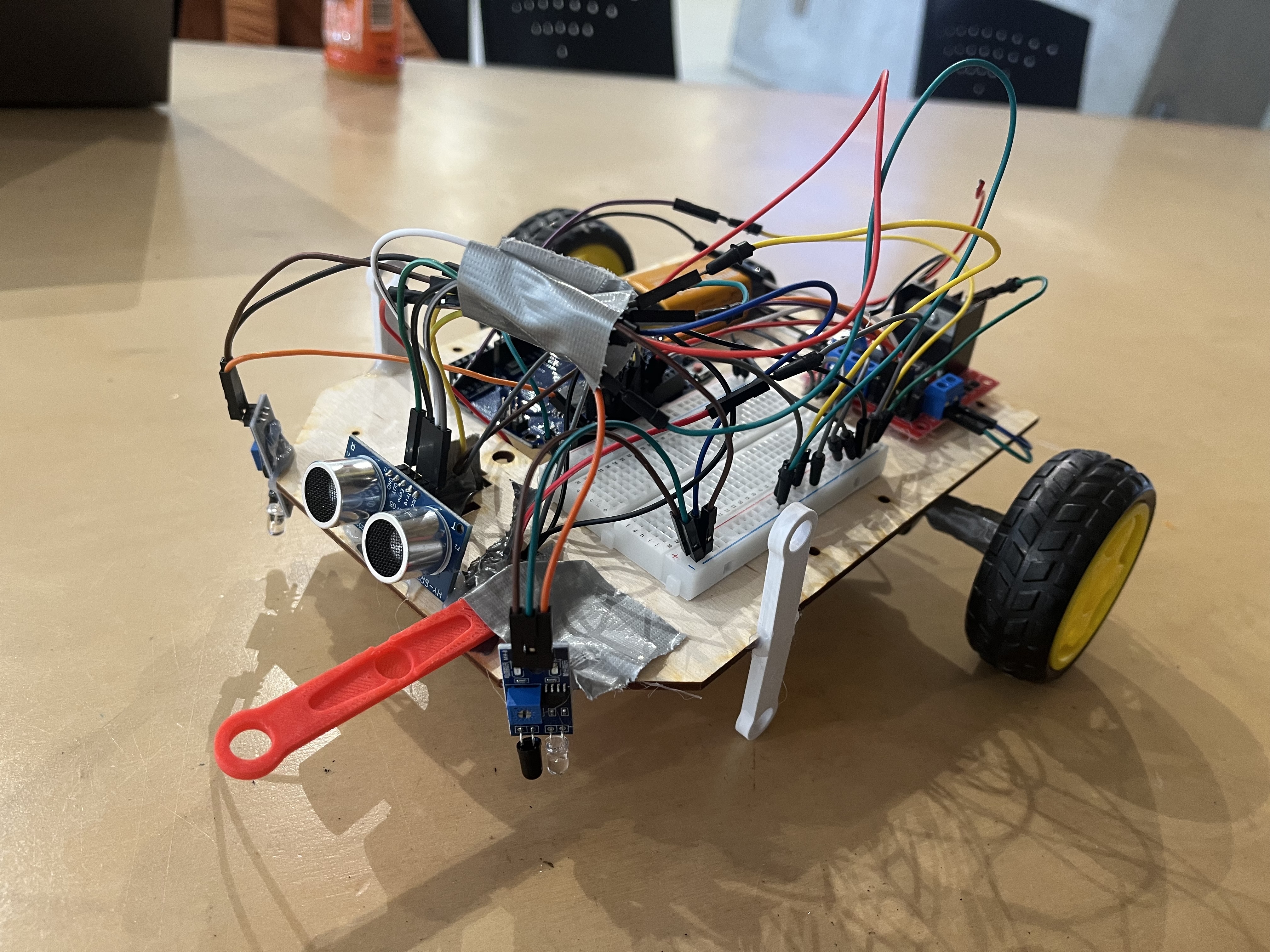
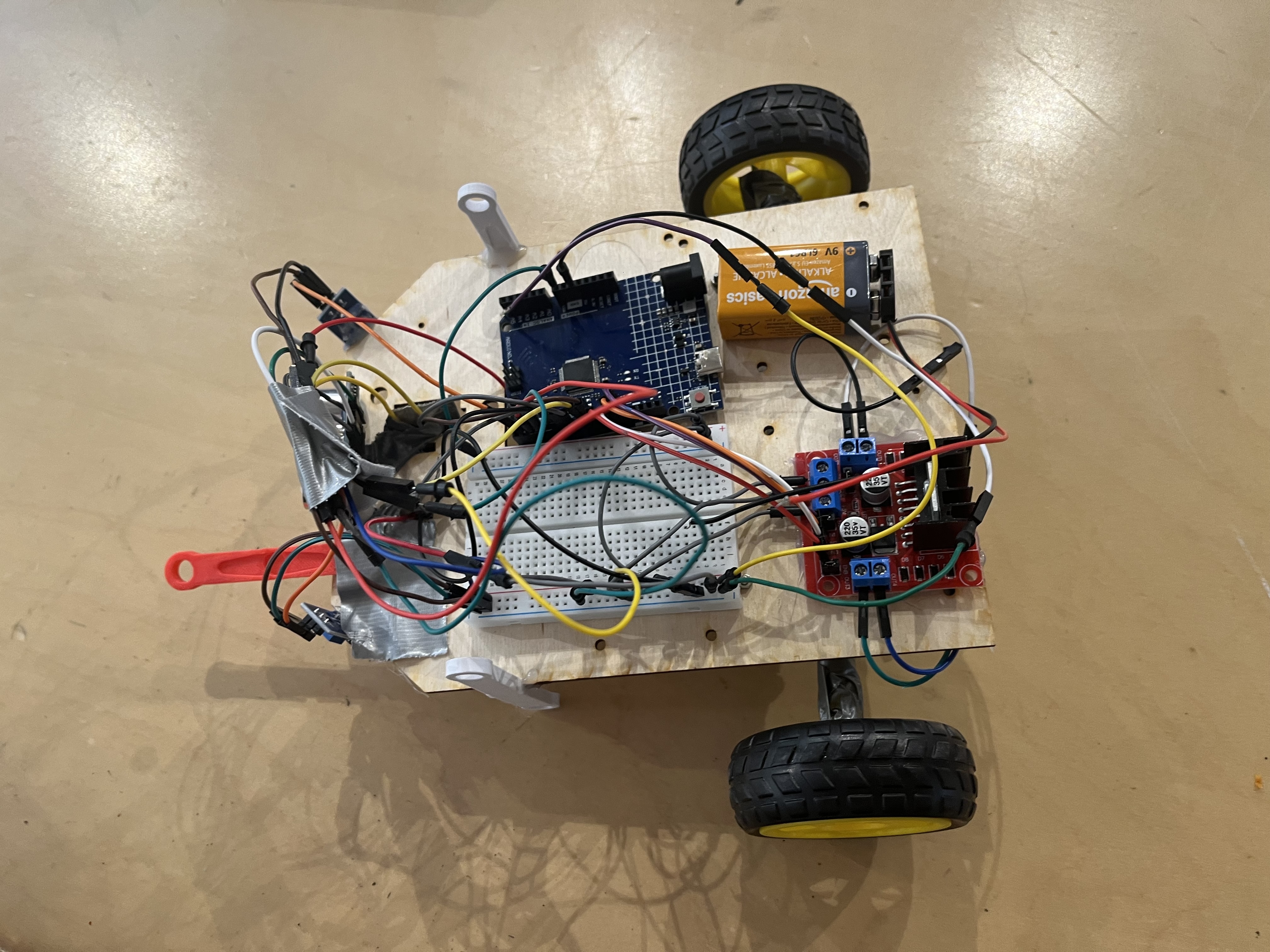
How we built it: We built it through the provided hardware parts and using Arduino software to upload the code onto the Arduino Uni.
The Vision: We integrated a TCS3200 color sensor, which we programmed to ignore "visual noise" and focus on the colored path.

Log in or sign up for Devpost to join the conversation.