Anti Glare Headlights:
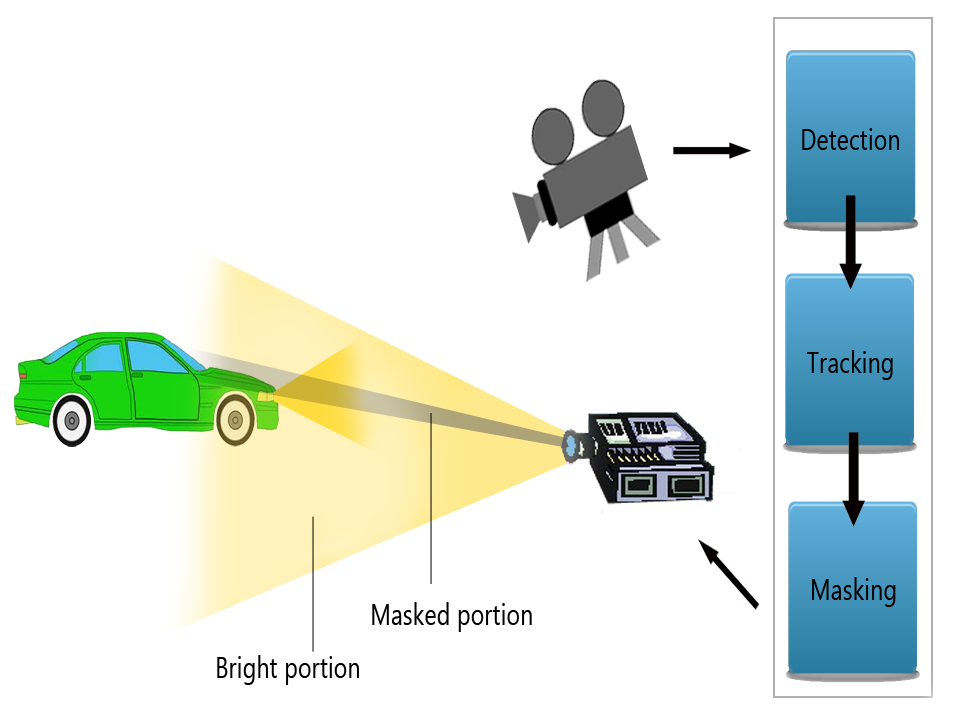
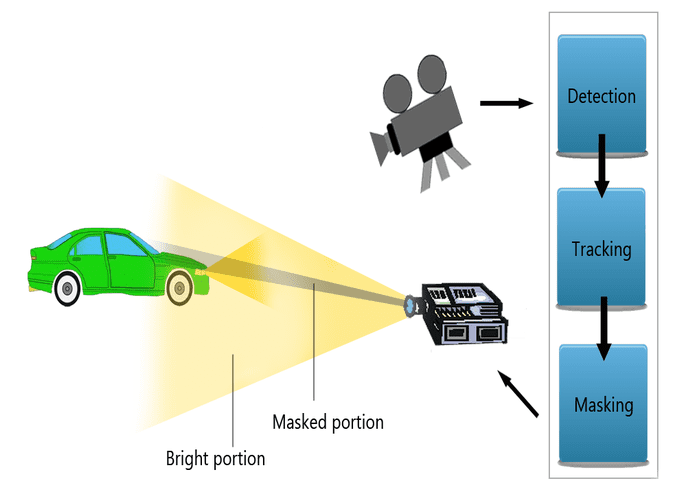
Our project is a solution to the blinding effect of oncoming headlights on the driver . Our system tracks the position of the headlights of the oncoming vehicles and assumes an approximate position of the drivers face. The headlights used are projectors and the computer on-board throws light everywhere except the opposite drivers eyes, allowing glare-less, hassle free driving.
Here's the Matlab code, but please watch the video for a better understanding.
% Lyle Rodericks
%initialise values
simtime = 200;
a = imaqhwinfo;
[camera_name, camera_id, format] = getCameraInfo(a);
vid = videoinput(camera_name, camera_id, format);
set(vid, 'FramesPerTrigger', Inf);
set(vid, 'ReturnedColorspace', 'rgb')
vid.FrameGrabInterval = 1;
% Start Video Capture
start(vid);
simuptime = 0;
while(simuptime<=simtime)
simuptime=vid.FramesAcquired;% Check no of frames completed
image = getsnapshot(vid);% Get the current frame
edited = imsubtract(image(:,:,1),150);%Reduce exposure values
edited = medfilt2(edited, [3 3]);%Reduce noise
edited = im2bw(edited,0.4);% Convert grayscale into a binary image.
edited = bwareaopen(edited,400);% Remove blobs less than 400px
bw = bwlabel(edited, 8);% Label all the connected components in the image.
blobs = regionprops(bw, 'BoundingBox', 'Centroid', 'Area'); % Image blob analysis
% Set raw,processed and output screens
subplot(1,3,1),subimage(image);title('Raw Footage');
subplot(1,3,2),subimage(imcomplement(edited));title('Detection and masking');
text(400,900,strcat('Simulation Progress: ',num2str(round((simuptime-1)*100/simtime)),'%'),'FontSize',14, 'Color','k','HorizontalAlignment','Center', 'VerticalAlignment','Bottom');
axis off
subplot(1,3,3),subimage(imcomplement(edited));title('Headlight Output');
hold on
subplot(1,3,3),rectangle('Position',[0,0,700,500],'EdgeColor','y','LineWidth',1,'FaceColor','y');
lightposition = [0,0,0,0,0,0,0,0,0,0,0,0,0,0,0];
%populate array with x coordinate of light
for (lights = 1:length(blobs))
centroid1 = blobs(lights).Centroid;
lightposition(lights)=round(centroid1(2));
end
%Search for horizontal pairs of headlightslights
for(lights = 1:length(blobs))
centroid1 = blobs(lights).Centroid;
area1 = blobs(lights).Area;
border = blobs(lights).BoundingBox;subplot(1,3,2),rectangle('Position',border,'EdgeColor','r','LineWidth',2');
a=text(centroid1(1)+15,centroid1(2), strcat('X:',num2str(round(centroid1(1))),' Y:',num2str(round(centroid1(2))),' A',num2str(round(area1))));
set(a, 'FontName', 'Arial', 'FontWeight', 'Normal', 'FontSize', 12, 'Color', 'green');
for(check = lights+1:length(blobs))
centroid2 = blobs(check).Centroid;
area2 = blobs(check).Area;
if(centroid1(2)-centroid2(2)<30)% search for pairs along x-axis
if(abs(area1-area2)<3000)% Confirm equal area / intensity
if(abs(centroid1(1)-centroid2(1))<500) % Confirm distance between headlights
subplot(1,3,3),rectangle('Position',[0,0,700,500],'EdgeColor','y','LineWidth',1,'FaceColor','y');
rectangle('Position',[border(1)-30,border(2)-round(abs(centroid2(1)-centroid1(1))*2/3),30+border(3)+centroid2(1)-centroid1(1),round(abs(centroid2(1)-centroid1(1))*2/3)],'EdgeColor','k','LineWidth',1,'FaceColor','k','Curvature',[0.8,0.6]);
end
end
end
end
end
hold off
end
% Both the loops end here.
stop(vid);% Stop video aquisition.
flushdata(vid);% Flush all the image data stored in the memory buffer.
clear all% Clear all variables
clc
end



Log in or sign up for Devpost to join the conversation.