-
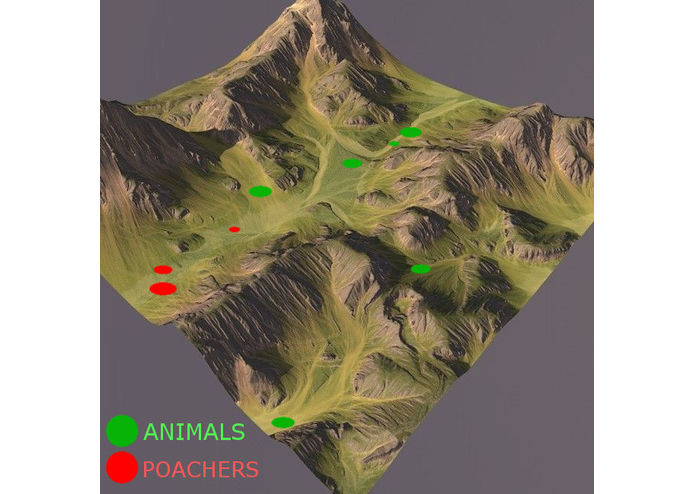
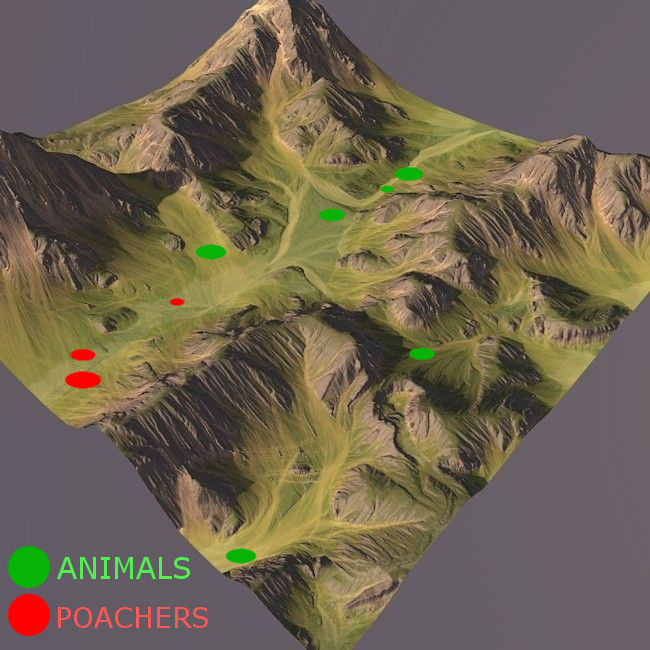
Visualization of the target implementation with elevation maps
-
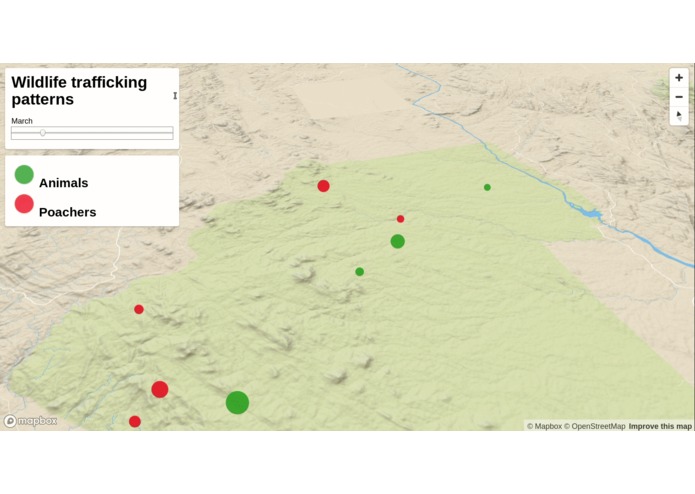
The prototype we created during the hackathon

What it does
The framework we had created during the hackathon allows overlaying data detected by a drone on 2D maps. In the extension of this framework we could apply the same methods to work with elevation maps from various sources (open digital elevation models, photogrammetry or LiDAR scanning).
How we built it
We created a simulation showing capturing LiDAR data from a drone and building an elevation model from it. In this step we used ROS (Robot Operating System) with Gazebo running as a simulator and RVIZ for displaying the received data.
For map display we had created a webpage with custom data source and linking to MapBox.
Accomplishments that we're proud of
We are proud of completing a working prototype of the framework throughout the hackathon and the reactions we had when we were presenting our idea to other people.
What's next for AniMaps
We still need to get in touch with experts to validate the viability of the idea. Then we would like to take the framework to next level and showcase data collected in real time appearing on the map and allowing the user to filter it.

Log in or sign up for Devpost to join the conversation.