-
-

Final Product
-
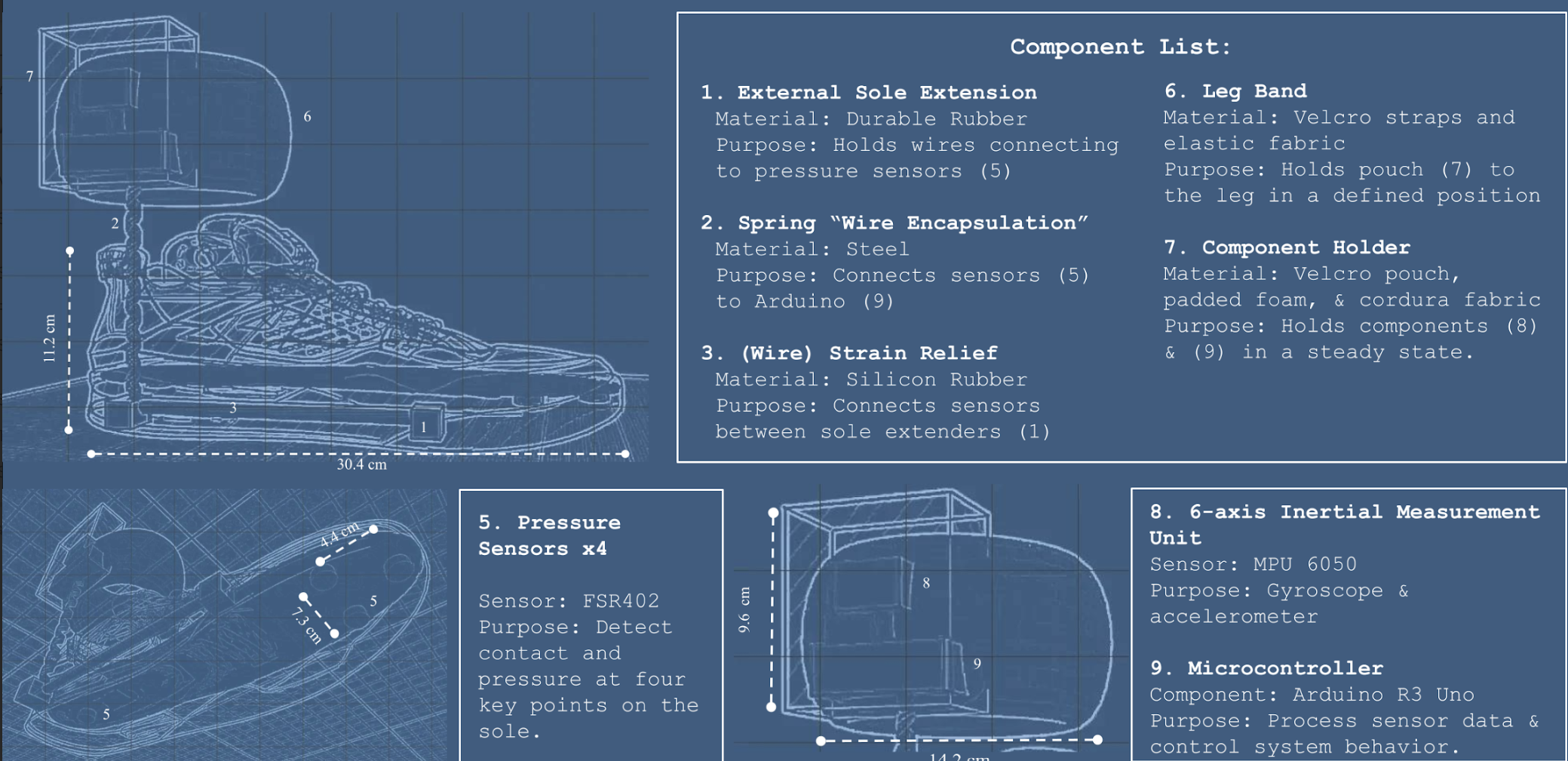
Blueprint
-
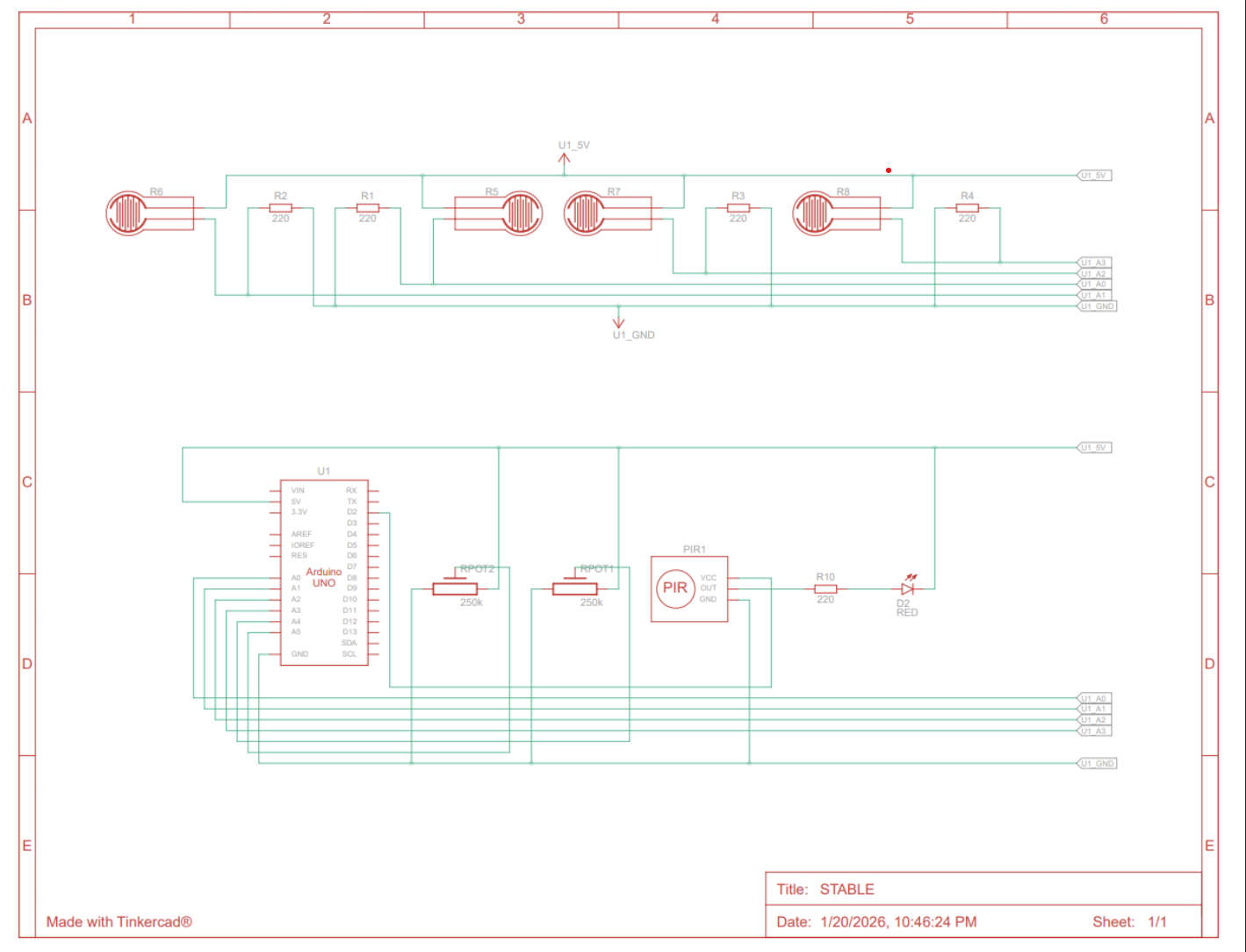
Circuit Diagram
-
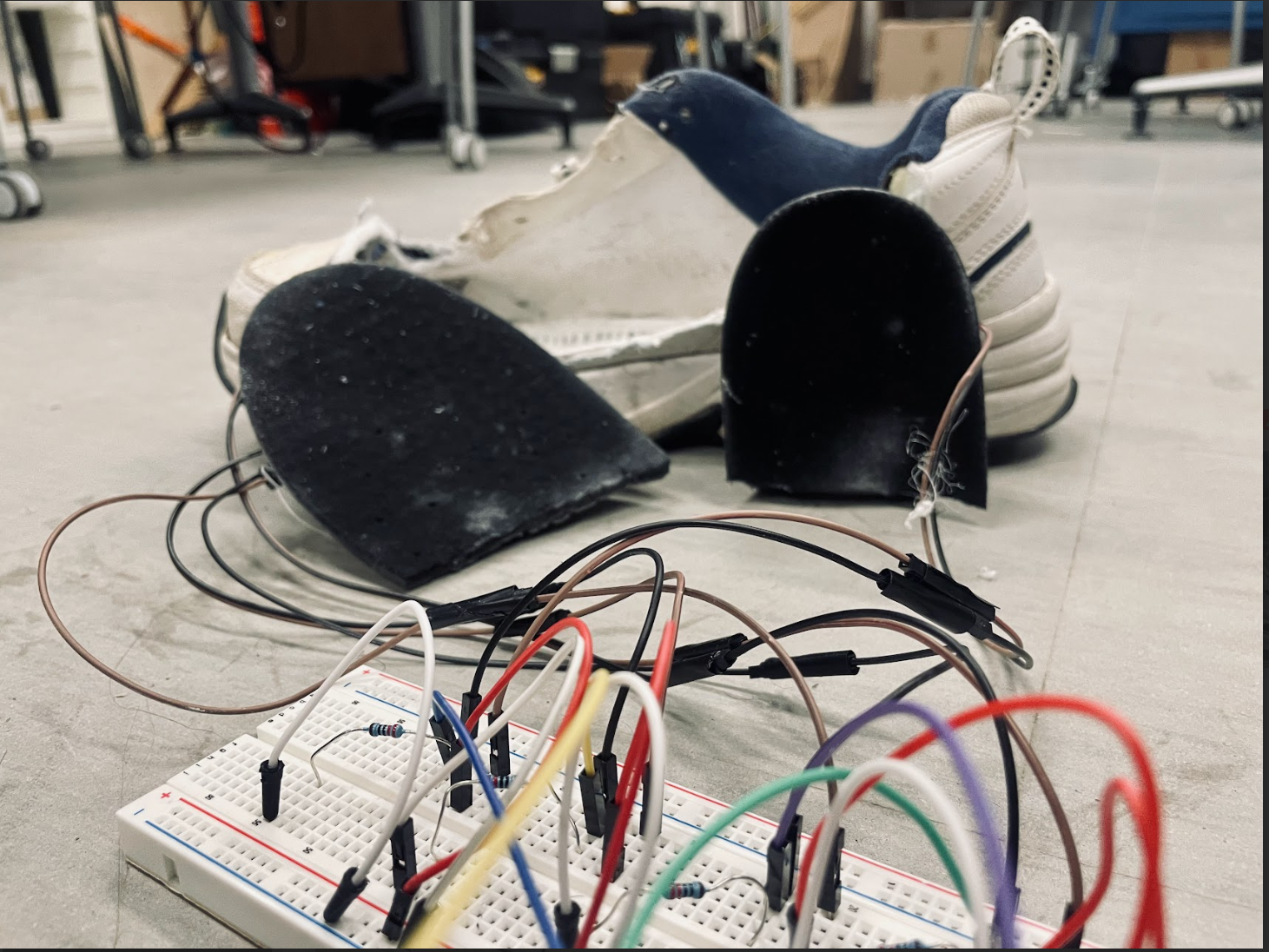
Insole Components
-
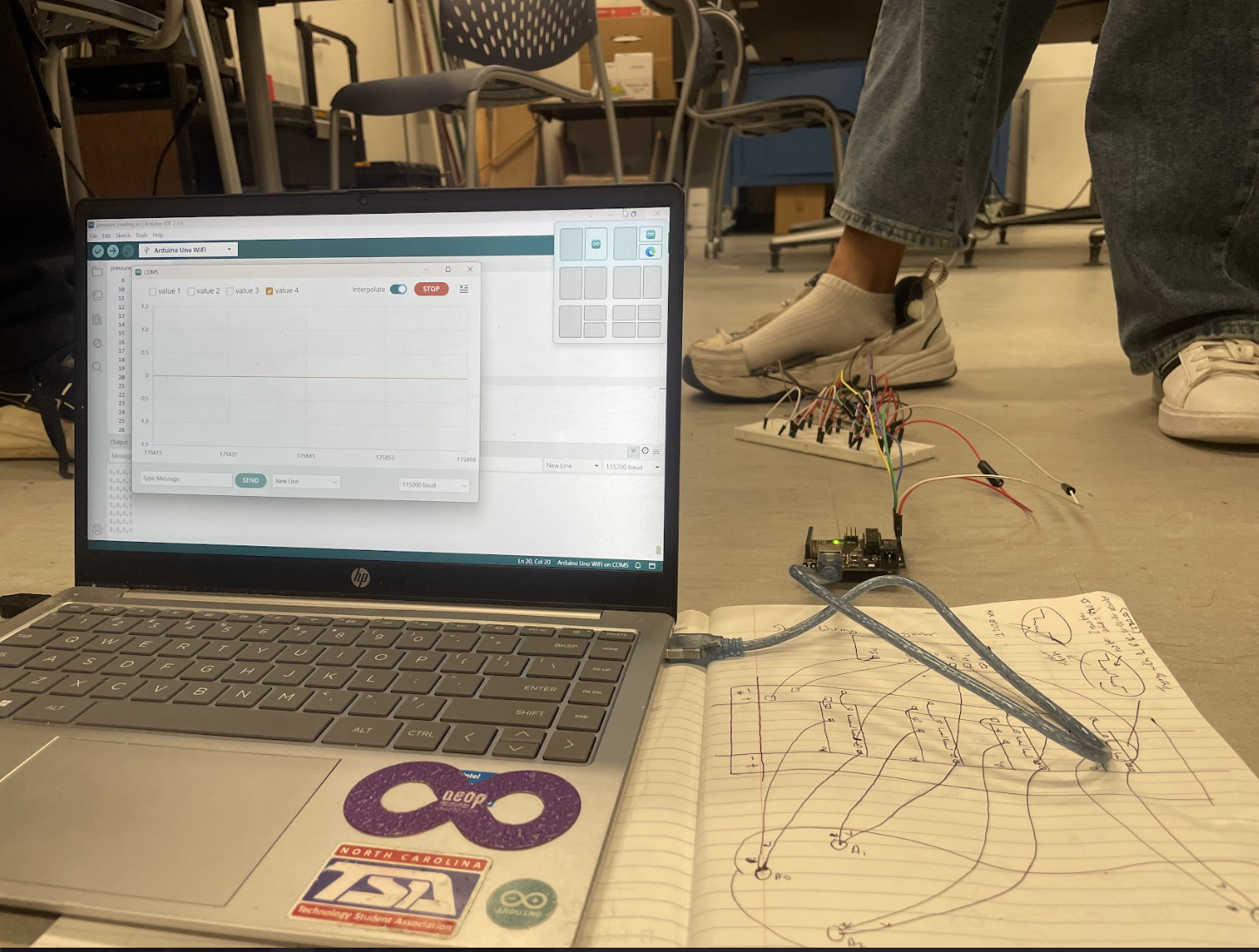
Test #1
-
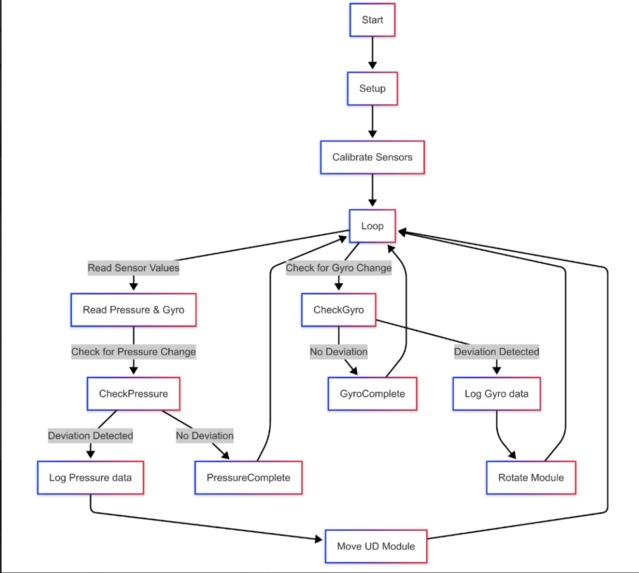
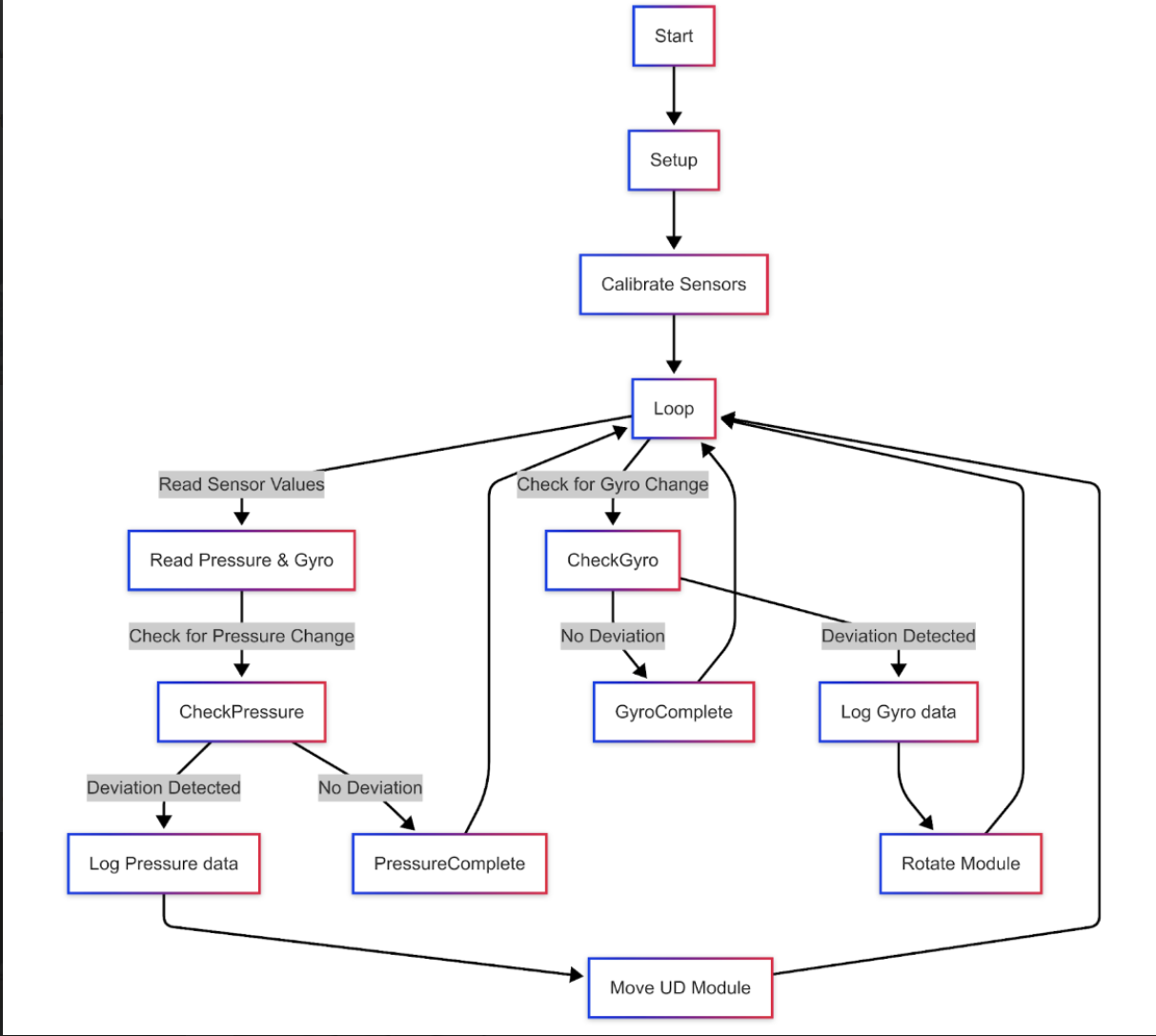
Flowchart

Inspiration
A member of our team’s grandfather is a retired officer from the Navy. During his strenuous years aboard on maritime ships, he faced treacherous conditions and countless hazards and obstructions (like slick decks, rapid movements, and low visibility) on the ships that could give an occasion for a life-altering fall or slip. Even the most experienced crew members were not entirely immune to these hazards, as they can occur with doing even the most diminutive tasks.
According to the CDC, there are around 400,000 maritime workers in the United States. Alarmingly, more than 40% of all reported maritime related incidents were due to a slip, trip, or fall on a vessel, costing more than $88,000 per fall. These incidents not only compromise safety, but also disrupt operations and put entire crews at risk, making maritime work one of the most perilous and costly endeavors in the country.
While Personal Protective Equipment (PPE) provides an external layer of protection against some of these incidents, 40% of maritime workers still suffer severe injuries from slips, trips, or falls. Approximately 37% of these cases are linked to fatigue, showing that the problem doesn’t lie solely in environmental hazards but also in the workers’ physical condition. As fatigue sets in, the muscles responsible for stabilizing each step begin to weaken, causing gait to become less controlled, less consistent, and far more prone to the kind of instability that leads to a fall. That connection between fatigue and gait is exactly what our team wanted to target. To address this, we developed a technology that continuously tracks and analyzes the gait stability of maritime workers through integrated pressure sensors, accelerometers, data collection, and machine learning.
What it does
Anchor is a smart insole system built for maritime workers, which is one of the most injury-prone fields in the country. Embedded with force-sensitive pressure sensors and a 6-axis IMU, the insole continuously monitors how a worker walks and feeds that data into a 1D Convolutional Neural Network that classifies gait patterns instantly. When the system detects a deviation from the worker's normal gait, it sends an immediate alert through a wearable IoT device, telling the worker exactly how to correct their movement before a slip or fall occurs. Every alert gets logged with its location on the vessel, and over time those logs build into a visual hazard map on the Anchor dashboard, showing ship members exactly which zones on the ship are most dangerous.
How we built it
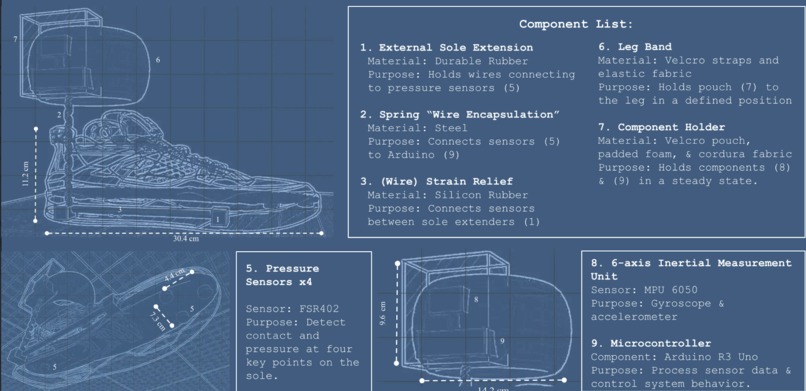
Using TinkerCAD, we first 3D modeled the shoe and its components. Each insole contains force-sensitive sensors embedded in four key areas across the foot. As someone walks, these sensors capture how and when force is distributed. The wires connecting the sensors run along our self-designed sole extenders, protecting the signal as it travels across the shoe. The wiring then runs up a flexible spring mechanism to avoid restricting movement while wearing the device, before entering the component chamber, which contains an Arduino microcontroller and an inertial measurement unit (IMU) that detects how the foot rotates and accelerates.
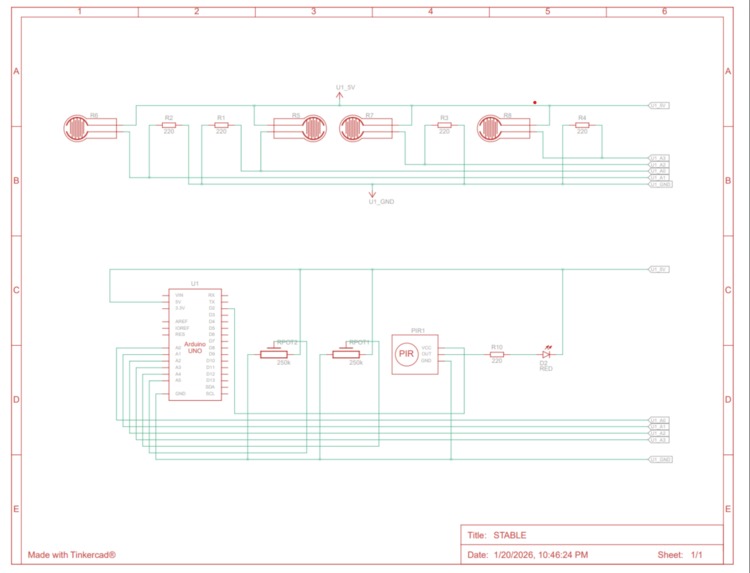
In the actual circuit diagram later provided, our 6-axis IMU, which contains both an accelerometer and gyroscope, is represented as a PIR sensor and two potentiometers due to limitations of the schematic software. The Arduino R3 reads the output from each pressure sensor through its analog pins, along with the rotation and acceleration axis data from the IMU through the remaining pins.
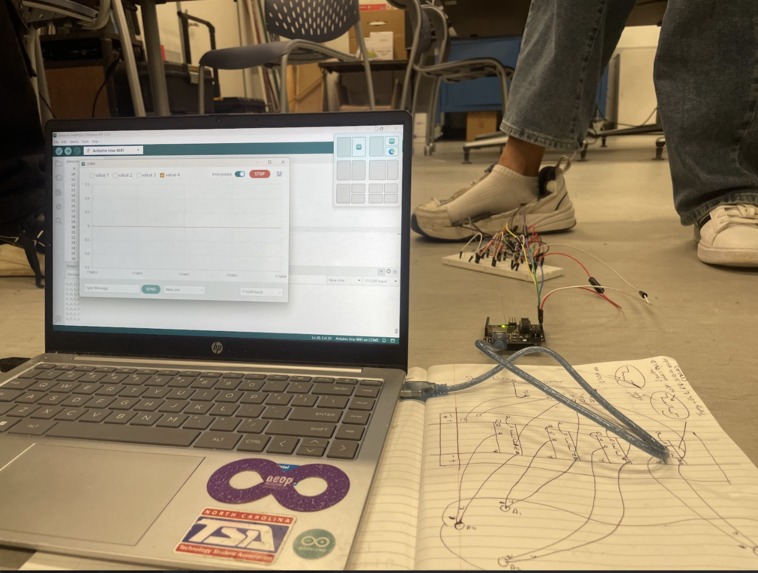
To test the system, one of our members wore the shoe and performed four different movement patterns, with the data saved as a CSV file on the device, which was later extracted and analyzed through our website. The dataset includes an overpronated toe strike, an overpronated heel strike, and additional gait patterns used for classification testing.
The collected data is uploaded to our web platform for processing. We first visualize the data as pressure–time graphs across different regions of the foot, allowing us to observe how force is distributed during each step. This data is then processed by a one-dimensional convolutional neural network built in TensorFlow, which analyzes temporal pressure patterns to classify gait into seven clinically defined categories, including heel strike patterns, overpronation, supination, and antalgic gait.
Our model was trained on 1,200 gait trials, achieving over 90% classification accuracy and maintaining strong performance on unseen data. Once a gait abnormality is identified, we assign biomechanical keywords, such as arch instability or insufficient heel support, to the classification.
This information feeds into a maritime safety dashboard, which converts gait data from the smart footwear into actionable safety insights. Built with React running in the browser via Babel and styled using Tailwind CSS, the platform allows operators to upload CSV files containing pressure-sensor readings. These inputs pass through an analysis pipeline that classifies gait patterns (e.g., overpronation or shuffling) and computes risk and fatigue scores.
A rule-based inference layer then reasons over these signals to generate human-readable diagnostics and recommended interventions. React hooks (useState, useEffect, useRef) manage the application state, including uploaded files, calibration timers, spatial markers, and event logs.
Operators can drag a marker on a ship map to tag the location of an incident. The system records the event, publishes alerts for higher-risk anomalies, and stores it in a log. Logged events are aggregated in real time to produce analytics on injury hotspots across ship zones such as the bow, midship, and stern, while periodic calibration uploads ensure analyses remain aligned with updated baseline gait data.
Challenges we ran into
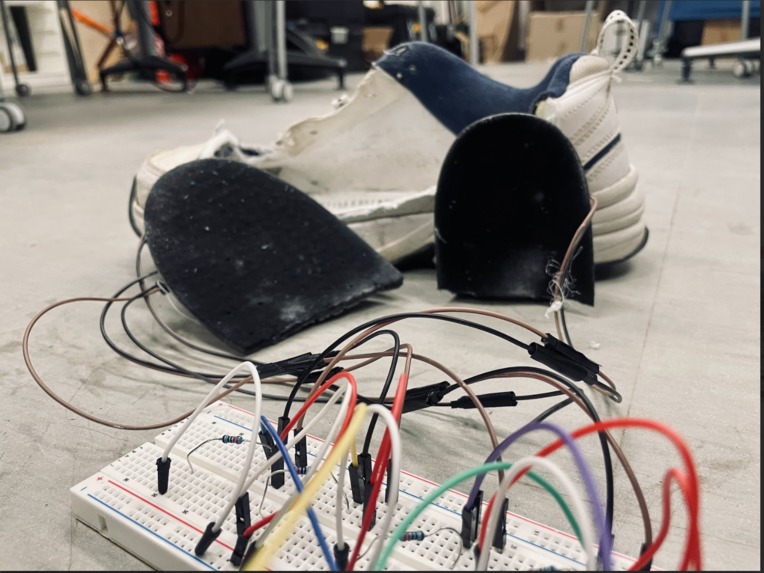
One of the biggest hardware challenges we ran into was figuring out how to physically design the insole in a way that actually made sense. Placing pressure sensors at precise locations on the sole sounded straightforward until we realized that every component needs wiring, every wire needs a path, and none of it can interfere with how a person naturally walks. Additionally, we needed the insole to fit anyone regardless of shoe size, so after brainstorming numerous ideas, we eventually solved this issue by splitting the insole into two halves, each with a pressure sensor, so the two pieces could slide relative to each other to accommodate different foot lengths while still capturing pressure data across the foot. However, during testing, we discovered our pressure sensor had a maximum reading of only two Newtons, which was too limited for the nuanced force fluctuations our classification system required. To adapt, we shifted our algorithm to measure the duration of full sensor activation rather than the rate of force change. This not only resolved the hardware constraint but actually simplified our classification approach, making it more generalizable.
Accomplishments that we're proud of
Looking back, there are a few things we’re really proud of with Anchor. On the hardware side, we’re proud of how we tackled the design challenges. Figuring out a one-size-fits-all insole by splitting it into two adjustable halves, threading wiring through custom sole extenders, and connecting everything with a flexible spring mechanism that still allowed natural movement, were not easy to execute. However, It all came together through a lot of trials, tribulations, and error.
The way we transformed an ordinary, every day object into a safety mechanism that has the potential to save lives makes this project incredibly valuable to us. While Anchor was built with maritime workers in mind, the technology can be applicable to many environments and situations outside of slips, trips, and falls in maritime environments. The same gait monitoring and instability detection could help elderly people avoid falls at home, athletes recover from injuries, or veterans like one of our team member’s grandfather regain confidence in his movement. Building something that could genuinely improve the lives of people close to us is why this project is very special.
What we learned
After completing this project, we learned a lot of technical and soft skills. In terms of hardware, figuring out how to integrate our components into something as small and flexible as a shoe insole pushed us to think carefully about design concepts and physical space, planning out the system architecture and creating blueprints, before ever constructing our insole. Training a 1D Convolutional Neural Network from scratch for the first time taught us why that architecture is specifically useful for gait data, which isn’t a single pressure reading, but a continuous sequence of movement over time. Building the website pushed us to think about communication, because a raw CSV of sensor readings means nothing to a maritime safety supervisor, so translating technical data into something easily readable is a skill in itself. As a team, our diverse backgrounds in engineering, programming, and biology, allowed us to think about every idea from multiple angles. That diversity also led to disagreements at times, like balancing circuit optimization with biological accuracy when placing our pressure sensors, but learning to compromise and make sure everyone’s voice was taken into account made our final product so much stronger than we could have ever imagined.
What's next for Anchor
Our next step is applying anchor to conditions beyond maritime environments. Seniors, athletes, and other workers in different terrains face similar challenges, where they often do not have proper footwear which causes issues later on. For example, many seniors die from complications related to their feet and wearing the wrong shoes, as wrong footwear can increase the risk of falls and severe injury. We also aim to use our device as a personalized recommendation tool, targeting general retailers to provide an enhanced solution to the general public and create a more equitable gait detection and recommendation system.
Built With
- 1d-cnn
- 6-axis-imu
- arduino-uno-r3
- babel
- colab
- csv
- force-sensitive-resistors
- gemini-large-language-model-api
- github
- html
- javascript
- react
- tailwind-css
- tensorflow
- tinkercad

Log in or sign up for Devpost to join the conversation.