Amthal: AI-Powered 3D Visualization Planner for EV Infrastructure
Turn EV policy into shovel-ready sites. Amthal uses AI and a true-to-scale 3D city to forecast demand, optimize charger placement, and help governments approve locations that are defensible on cost, grid readiness, and equity.
Inspiration
Cities have ambitious EV targets, yet ground reality lags. Mandates are rising while siting remains slow, opaque, and fragmented. Static maps and spreadsheets cannot capture real travel patterns, grid constraints, and equity needs in one view, which creates charging deserts and underused assets. We built Amthal to close this disparity with a visual, AI-guided workflow that moves plans from targets on paper to locations that work in the real city.
What It Does
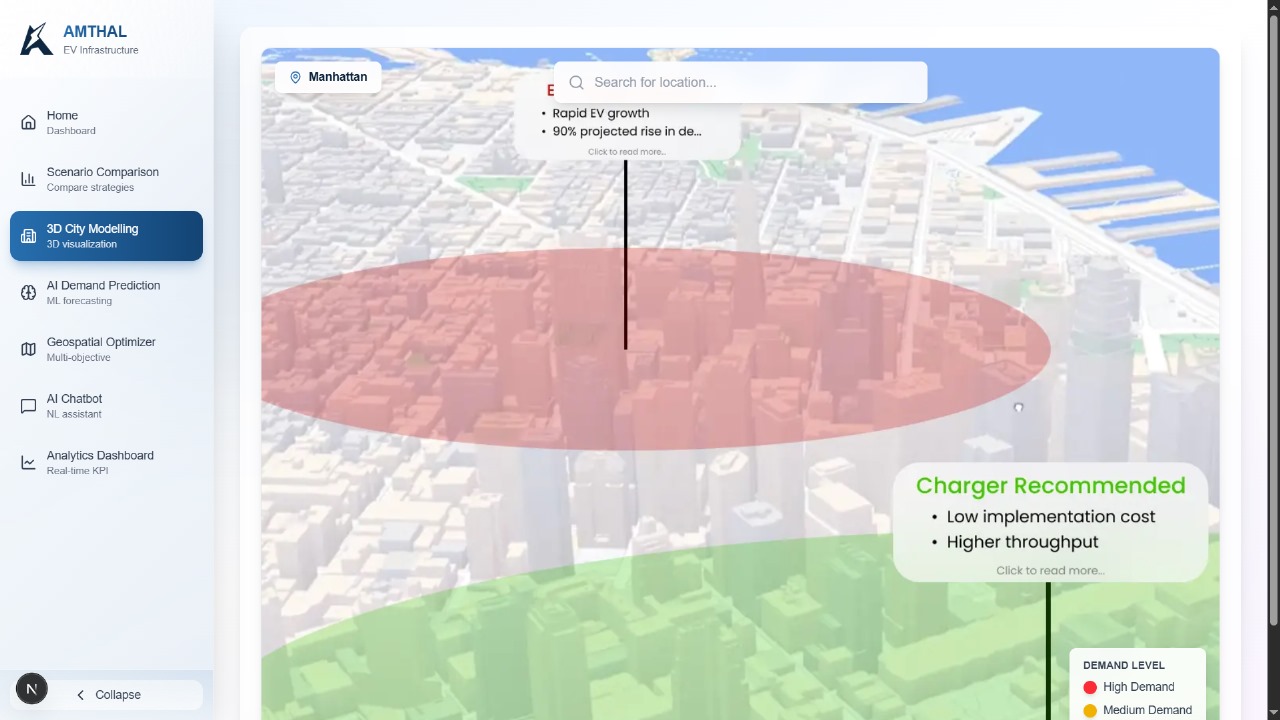
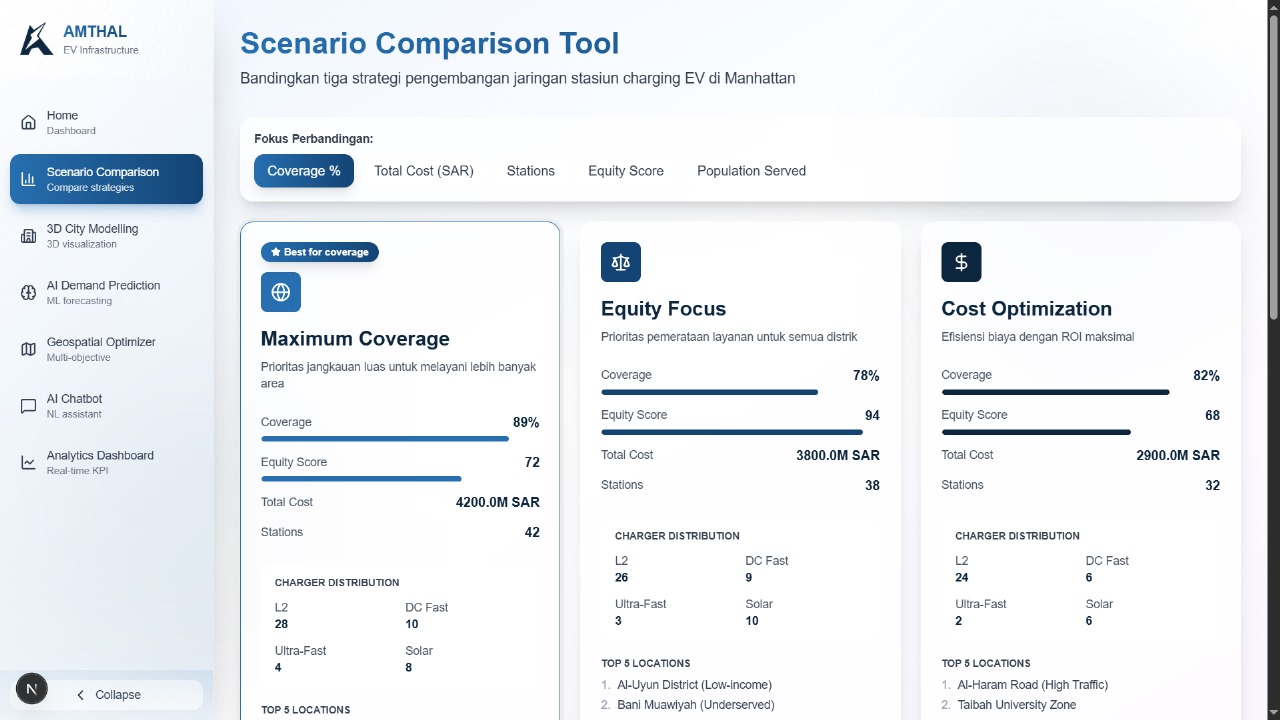
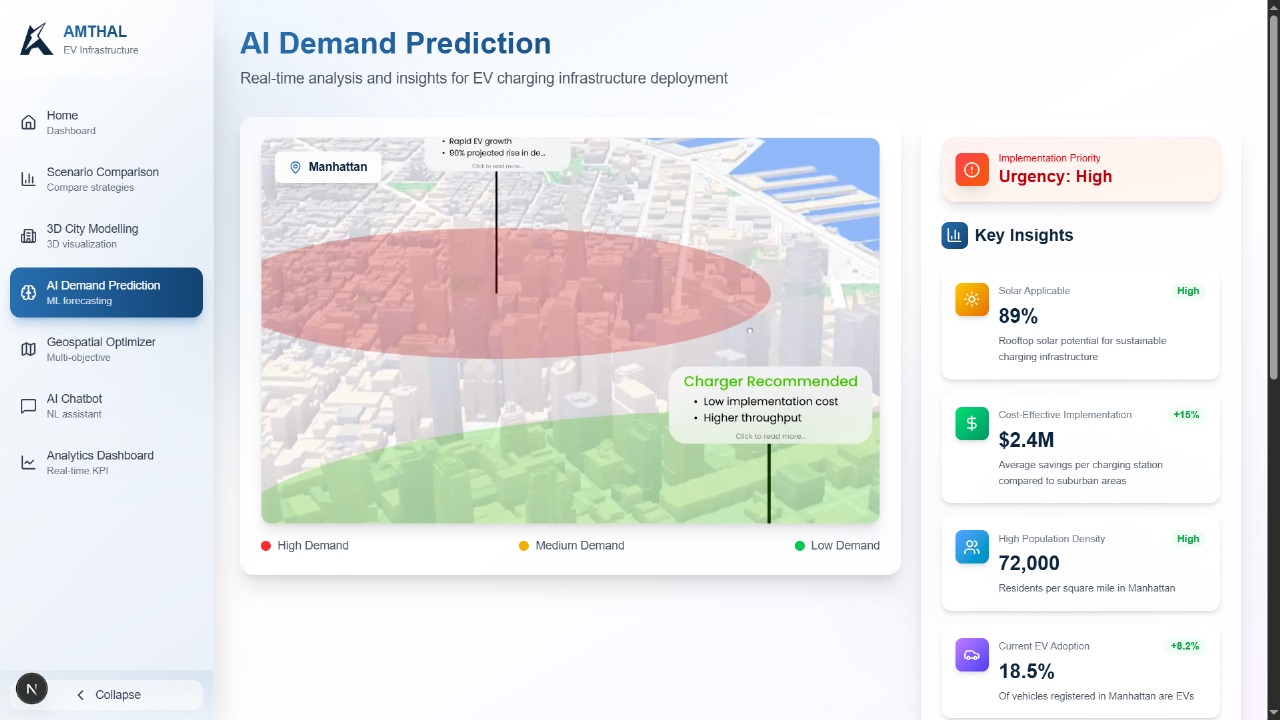
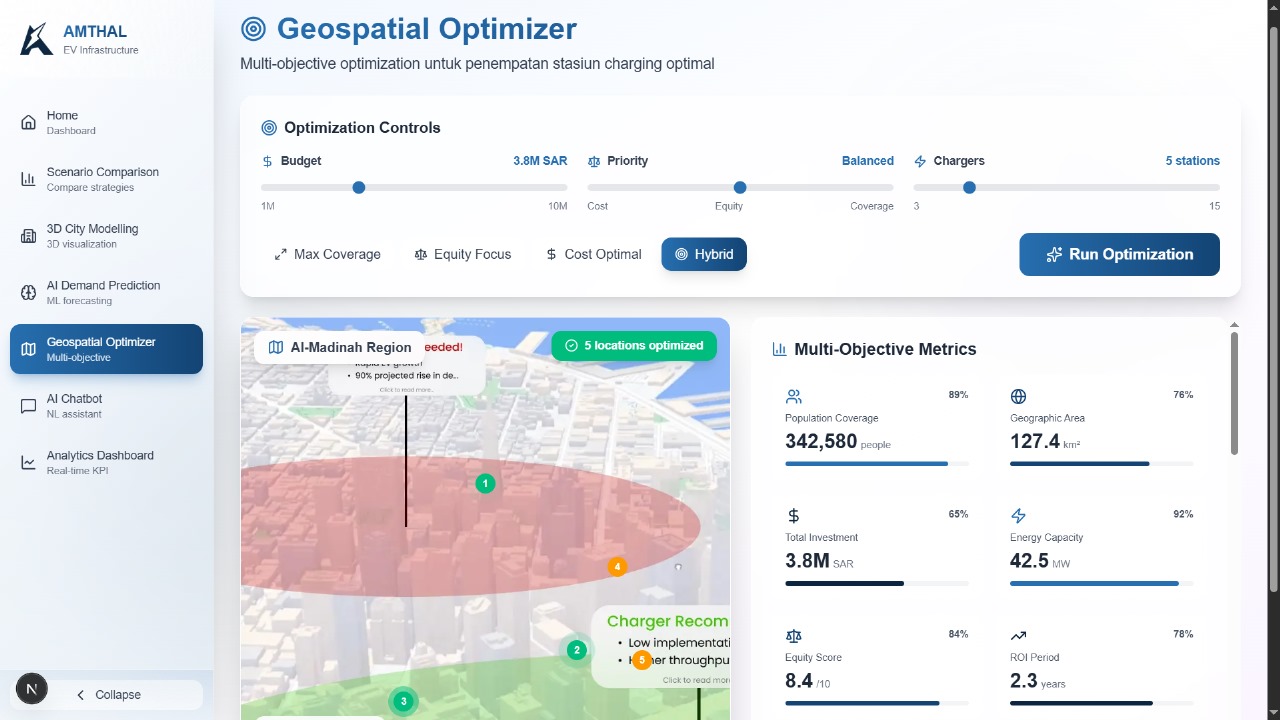
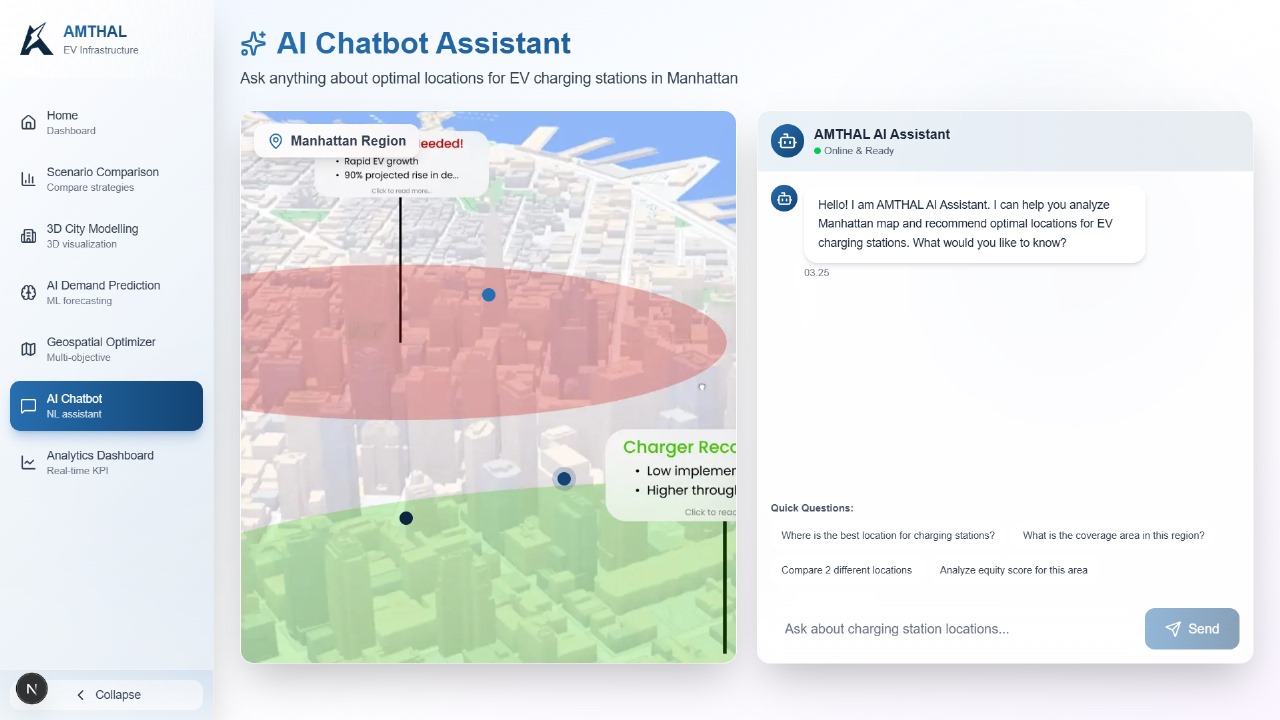
Amthal is an AI-powered 3D Visualization Planner that turns EV charging policy into shovel-ready sites. It forecasts neighborhood-level EV adoption, optimizes locations against budget, coverage, grid capacity, and equity, and renders the result in a true-to-scale 3D city. Buildings are extruded, chargers and transformers appear at realistic size, 5 km drive-time coverage is shown as clear polygons, and Solar API overlays inform canopy decisions. A planning copilot powered by Gemini answers policy questions in plain language, compares scenarios, and produces executive briefs in multiple languages.
How We Built It
Google Maps Platform for the interactive 3D canvas with Maps JavaScript API and WebGL, Places for candidate sites, Distance Matrix and Routes for realistic drive times, Geocoding for address intelligence, and Solar API for irradiance and shadow checks.
- Vertex AI for EV-adoption prediction that paints a probabilistic demand heatmap guiding placement.
- Google Cloud Functions to run optimization endpoints and business logic using OR-Tools for facility-location and multi-objective constraints.
- Firebase as the product backbone: Hosting for the app, Auth for secure roles, Firestore for scenarios and results, and Storage for layers and report assets.
- Gemini as the conversational copilot that explains trade-offs, answers “what if” questions, and drafts executive summaries.
Key Features
- 3D City Modelling and Visual Feasibility True-to-scale buildings, charger and transformer objects, five-kilometer coverage polygons, and Solar API overlays make feasibility clear in minutes.
- Optimization Console OR-Tools balances coverage, cost, grid capacity, and equity, then renders winning sites on the 3D map with per-site metrics. Distance Matrix, Routes, and Geocoding ground coverage in real travel.
- AI-Powered Demand Prediction Vertex AI learns from population density, income, housing type, commute distance, and proximity to activity centers, producing a neighborhood-level probability heatmap.
- Planning Copilot with Gemini Natural-language queries for budget-aware and equity-first strategies, ranked recommendations with reasoning, and multilingual executive briefs.
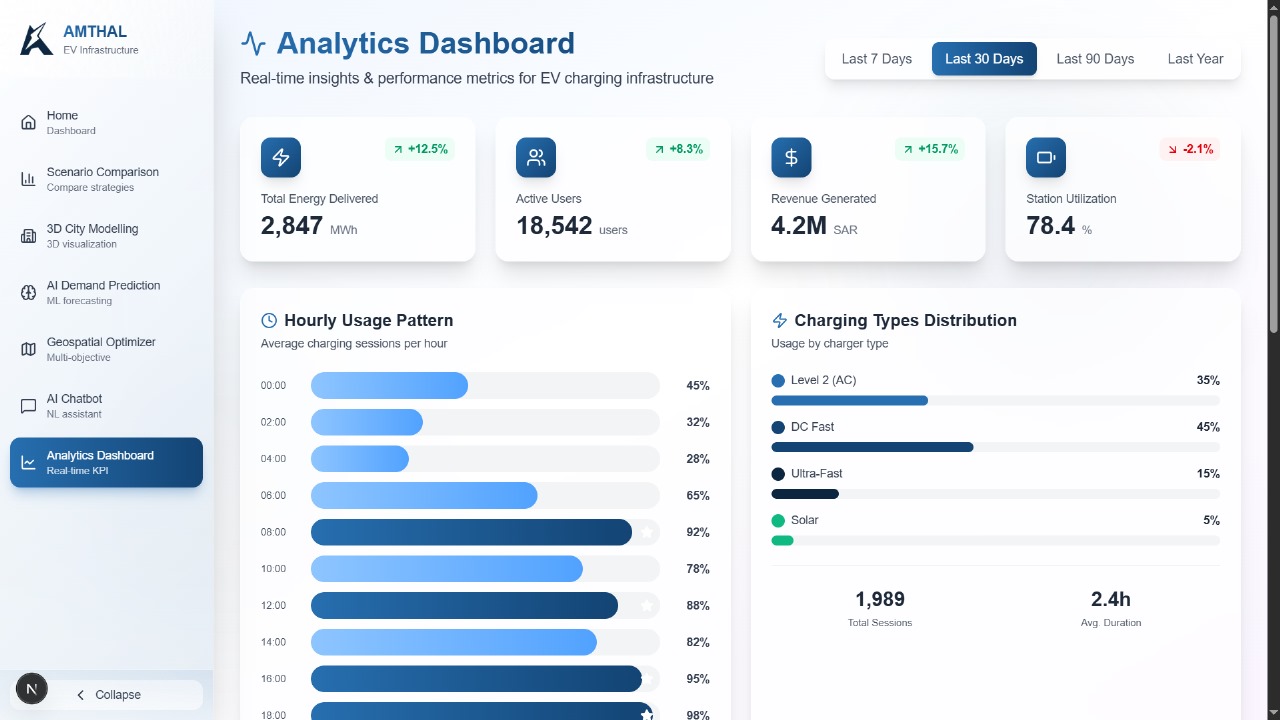
- Scenario and Reporting Compare coverage-first, equity-first, and cost-first strategies in the same 3D canvas, then export polished PDFs for stakeholders.
How It Works
Amthal auto-ingests roads, POIs, routing, drive times, and solar layers from Google Maps Platform. It syncs scenarios and constraints in Firestore, forecasts EV adoption with Vertex AI to form a demand heatmap, and runs OR-Tools inside Cloud Functions to generate optimal site sets that meet budget targets, coverage goals, grid limits, and equity thresholds. The 3D planner validates feasibility with shadows, solar potential, and true-to-scale objects that stakeholders can inspect together, while Gemini explains trade-offs and produces concise briefs ready for approval.
Challenges We Ran Into
City data is uneven. Maps provides roads, POIs, routing, and solar, but demographics, zoning, grid service zones, and existing charger inventories vary by place. We solved this with connectors and sensible fallbacks, including proxy features for grid readiness where utility data is limited. Rendering performance was another hurdle; tiling, level-of-detail, and lightweight 3D objects kept the experience smooth on typical laptops without losing clarity.
Accomplishments That We’re Proud Of
We delivered a planner that non-technical stakeholders can understand in seconds while preserving analytical rigor. The 3D scene makes feasibility tangible, the optimizer balances policy goals without hiding trade-offs, and the copilot turns complex analysis into ranked recommendations and multilingual briefs. Together, these pieces move programs from mandate to mapped and ready to build.
What We Learned
Clarity comes first. A shared 3D canvas builds alignment fast, then AI and optimization add depth behind the scenes. Good defaults matter. Preloaded scenarios, reasonable constraints, and auditable assumptions shorten the path from first click to first decision. Serverless fits the workload well, and Cloud Functions lets us run OR-Tools at city scale without heavy ops overhead.
What’s Next
From just a visual idea to a real city pilot. If selected as a finalist, we will harden Amthal into a production web app on Firebase, run EV-adoption forecasting on Vertex AI, serve optimization with Cloud Functions, and deliver a live 3D planning canvas on Google Maps Platform with Solar API overlays. Hopefully we will be able to partner with a city, connect zoning, existing chargers, and grid service zones or approved proxies, and complete the first optimize, validate, approve loop with planners using Gemini as the policy copilot. Success means faster decisions, higher coverage in priority districts, and documented capex avoidance from eliminating low-utilization sites, proving that Amthal moves EV infrastructure from map to reality.
Tech Stack
Google Maps Platform, Vertex AI, Firebase (Hosting, Auth, Firestore, Storage), Google Cloud Functions, Gemini, React, OR-Tools
Built With
- cloud-function
- firebase
- gemini
- google-maps
- google-maps-gl
- vertex-ai





Log in or sign up for Devpost to join the conversation.