-
-
First Place Winner on Amazon Robotics Track
-
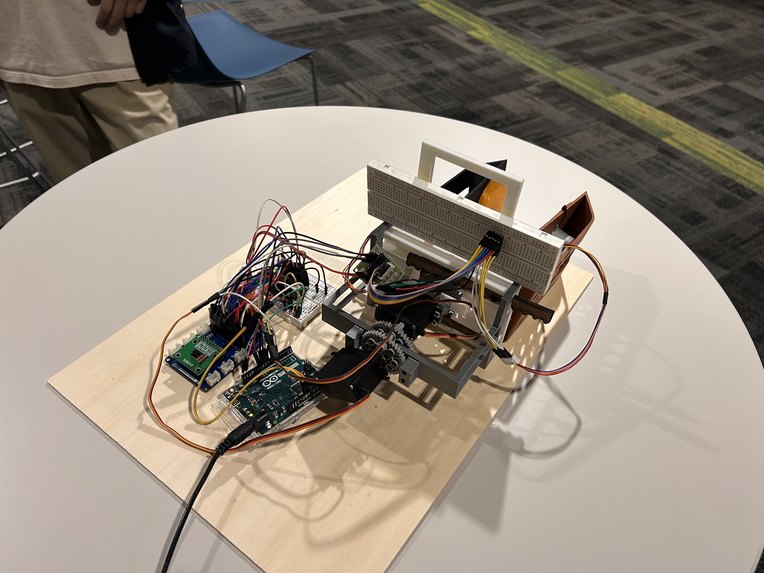
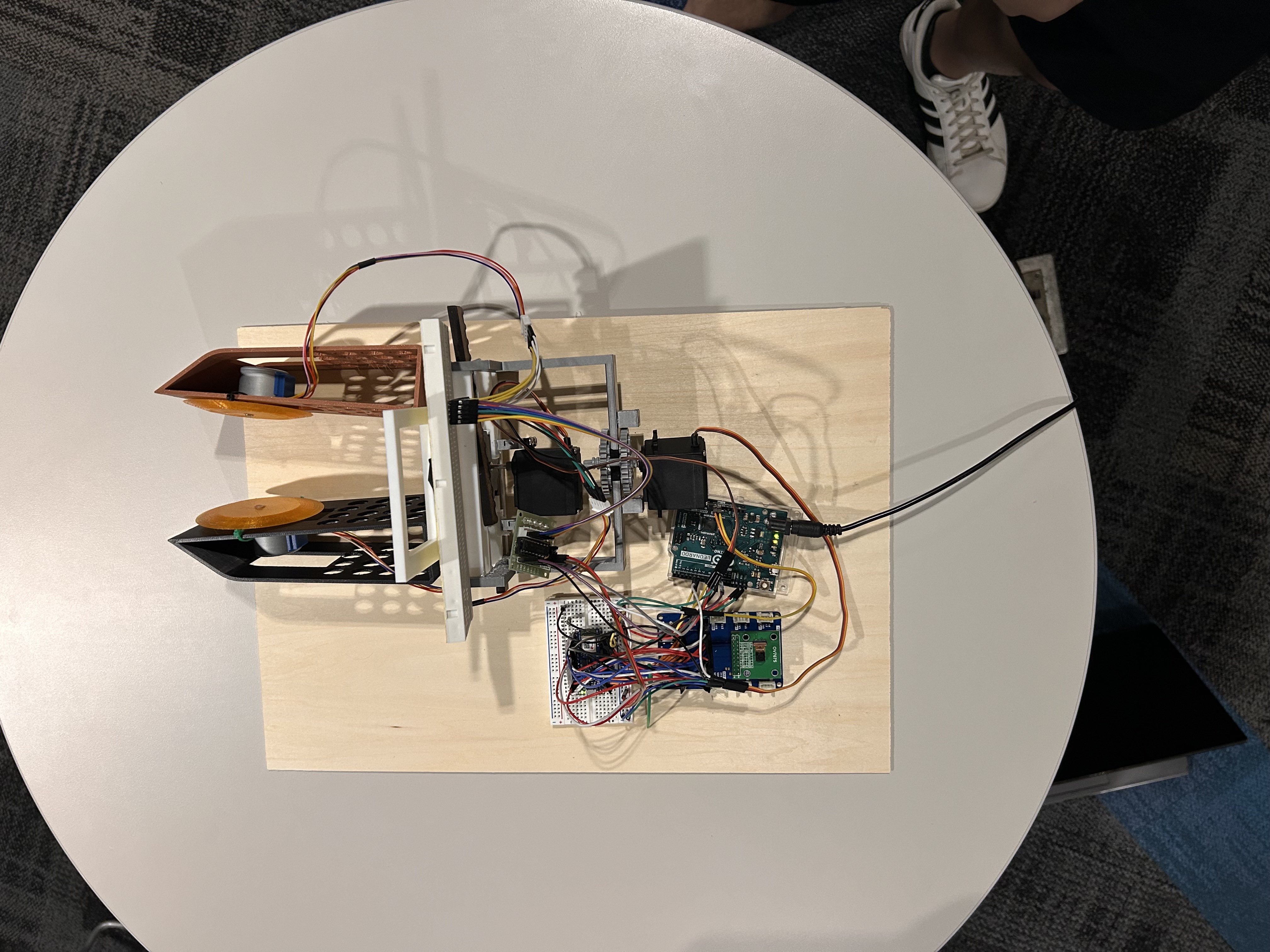
Rear View of Robot (with Breadboards and Wiring)
-
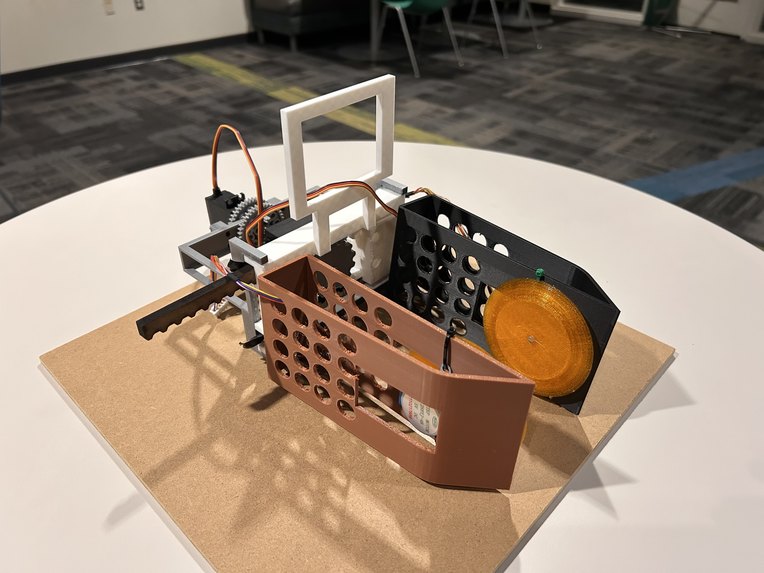
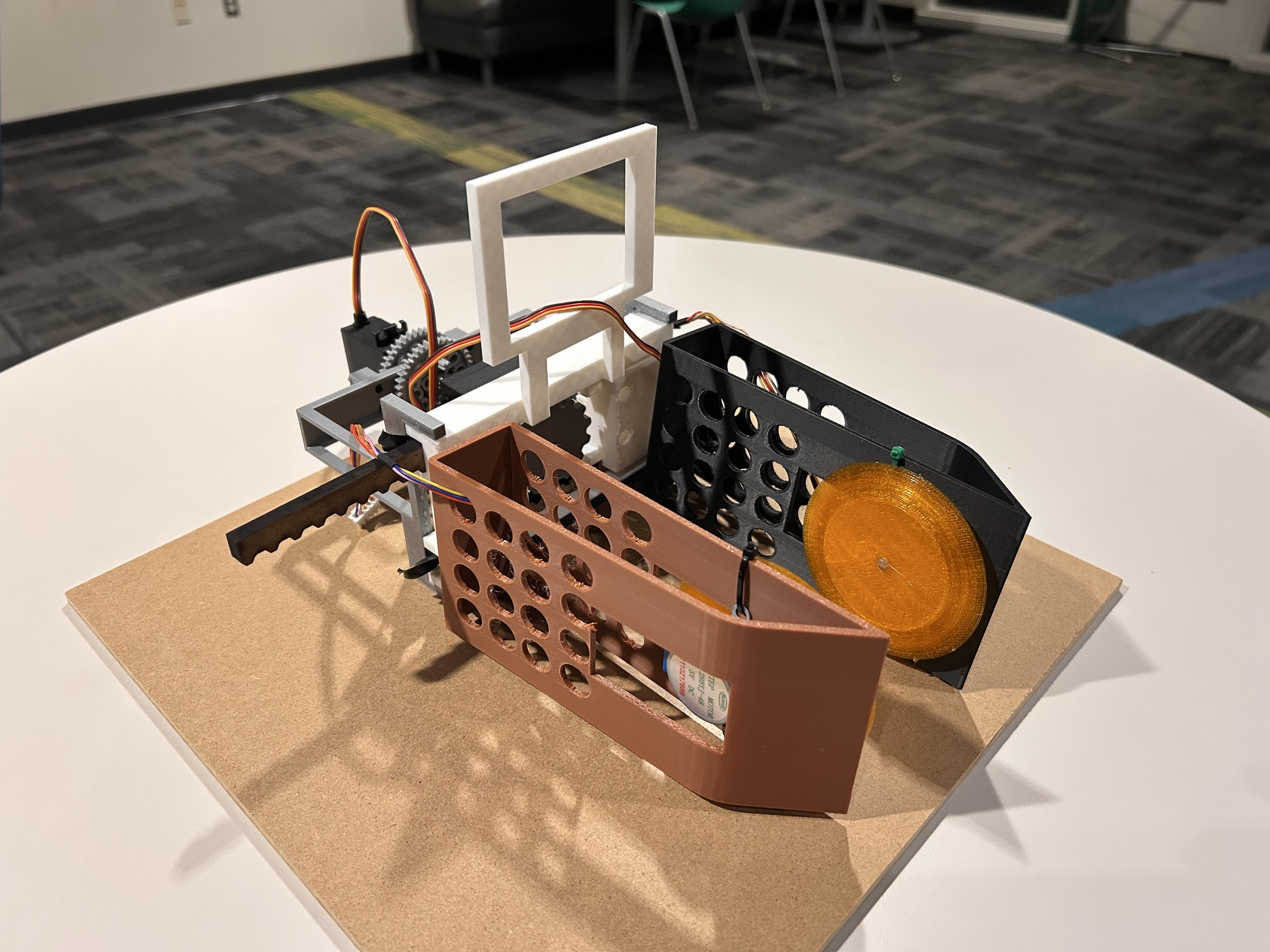
Front View of Robot (Structure)
-
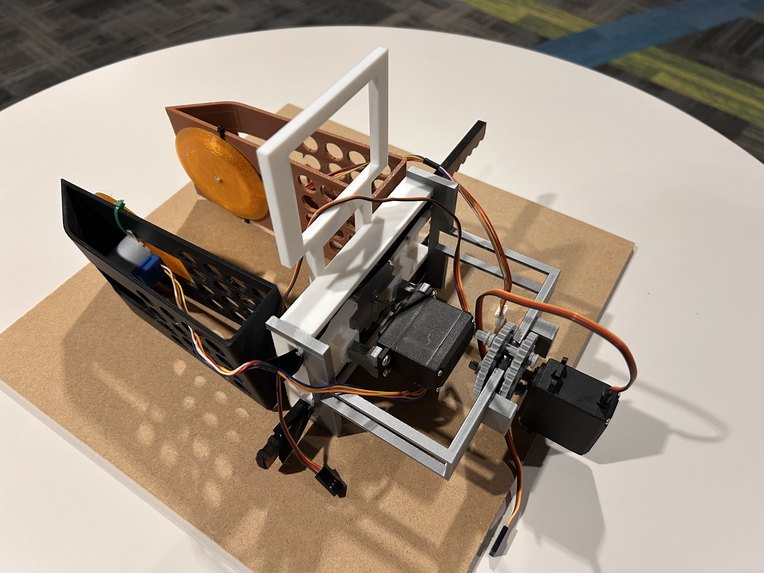
Rear View of Robot (Structure)
-
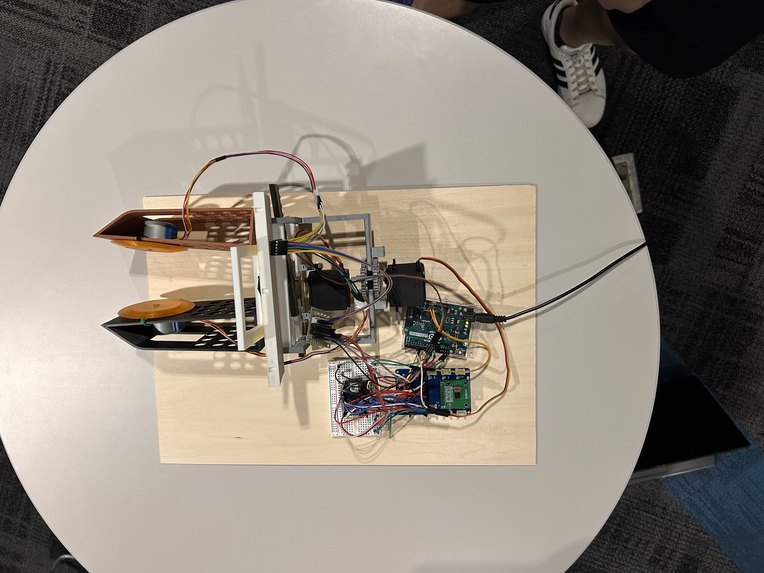
Top View of Robot (with Breadboards and Wiring)
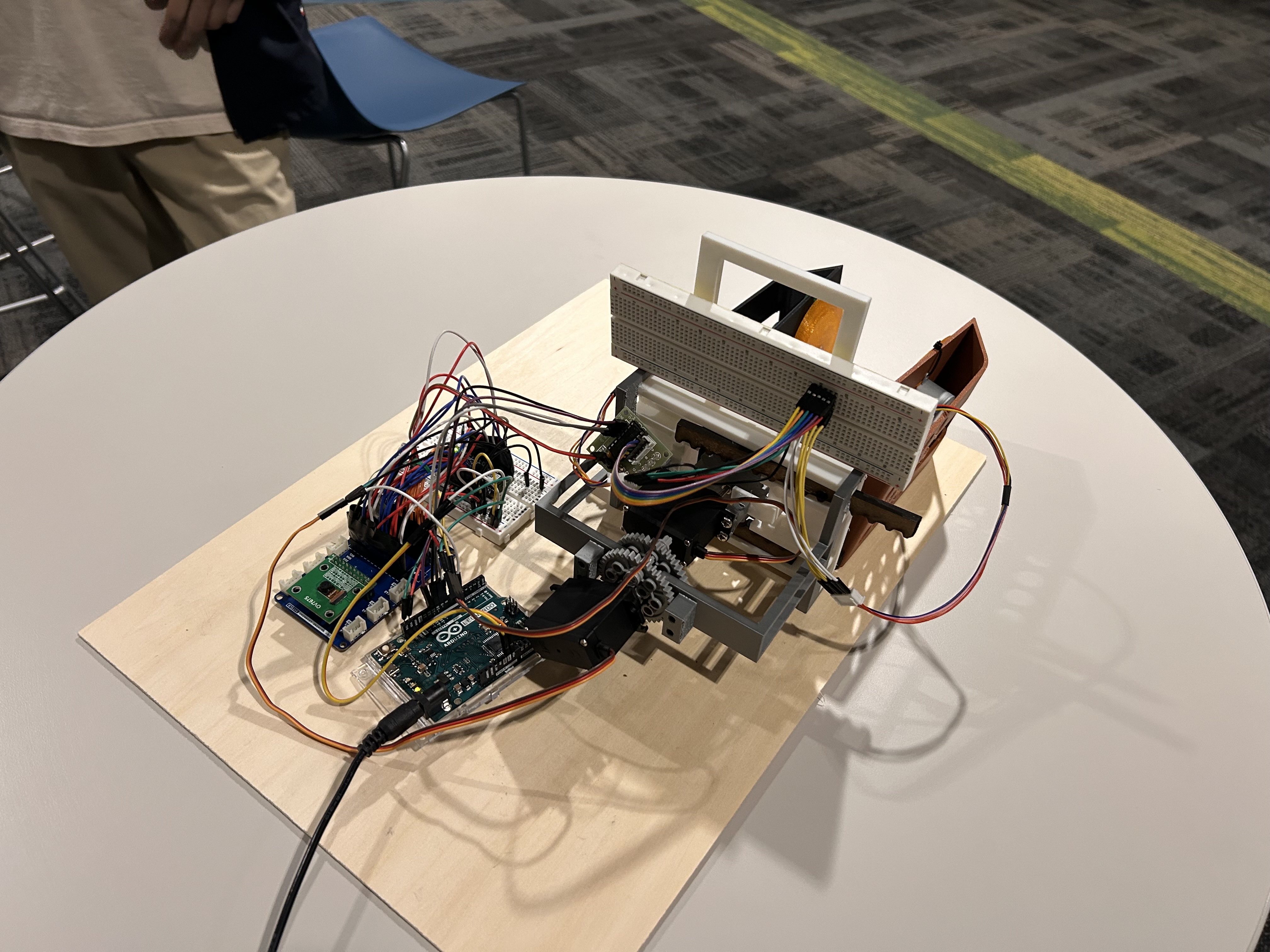
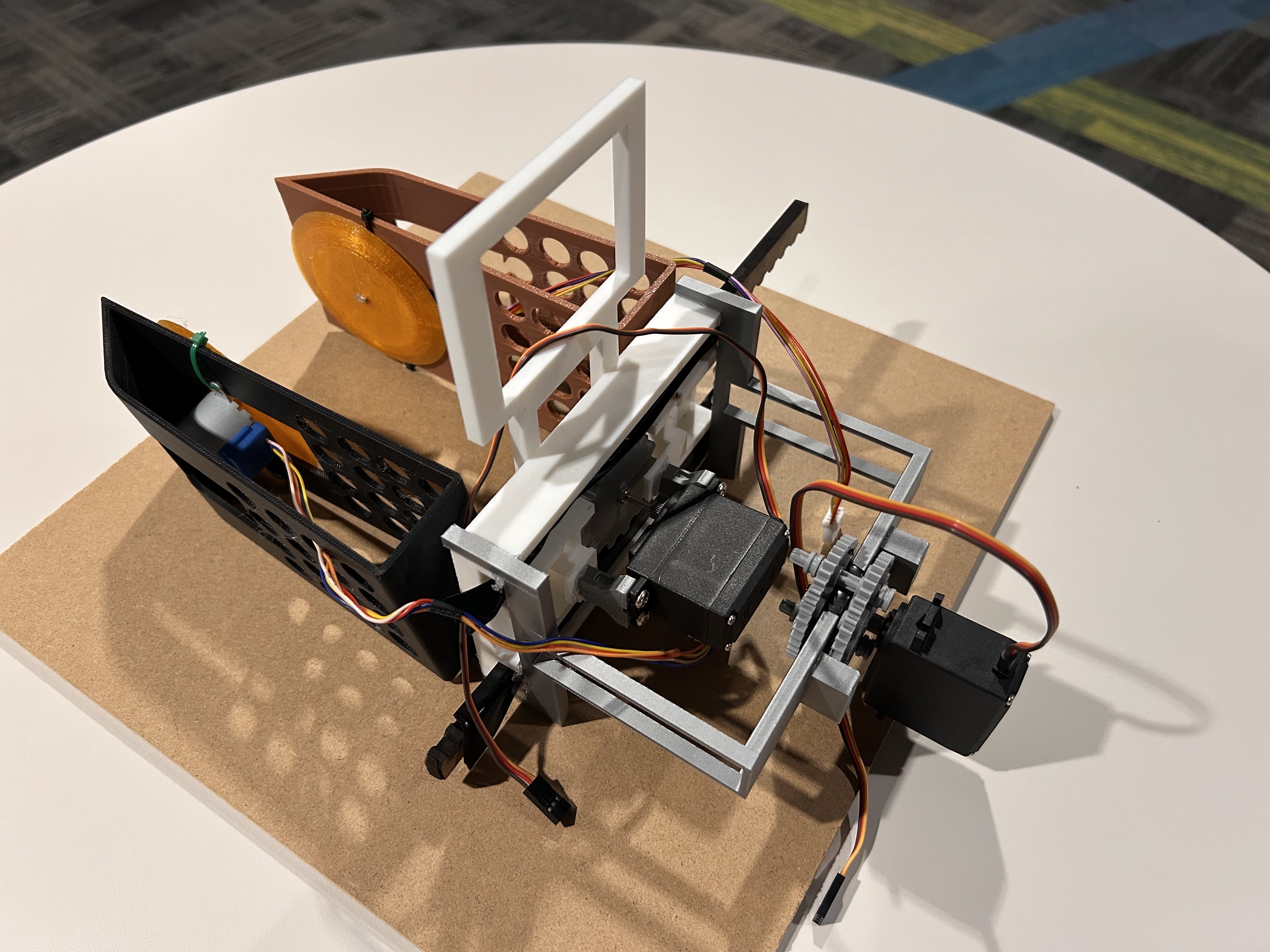
Our robot provides basic functionality needed to grab delivery boxes using two wedge-shaped arms, controlled using a DC motor and rack-and-pinion mechanism. Each arm includes step motors to rotate the box in 90-degree increments to check for barcodes on each side. We identify barcodes using a compressed computer vision model we trained using sample barcode images, and the model itself runs directly on the Arduino. Our robot also features an outer arm (controlled using a DC motor) to rotate the boxes 90-degrees sideways to ensure all six sides of the box are checked for bar codes.
Though our final robot provides only basic functionality for each of the aforementioned functions, it could've certainly benefited from refinements like an improved stability for the robot arms and outer motor mechanisms. Our final design also lacks certain features needed for real-world use, like a separate CV model to identify box edges, and some of the features aren't fully automated (i.e. need human supervision to work).
Due to the shorter timespan of the competition, we ran into challenges related to 3D-printing (e.g. not having enough time to print parts and, as a result, making design compromises to reduce printing time), having issues with our circuit related to power consumption, and other smaller issues related to integrating all parts and sensors into a comprehensive final design. That said, as a beginner robotics team, we gained valuable experience in robotics design, building circuits, developing CAD models, and analyzing various design choices and components, carefully weighing their trade-offs, to ultimately develop a well-rounded final product.

Log in or sign up for Devpost to join the conversation.