-
-
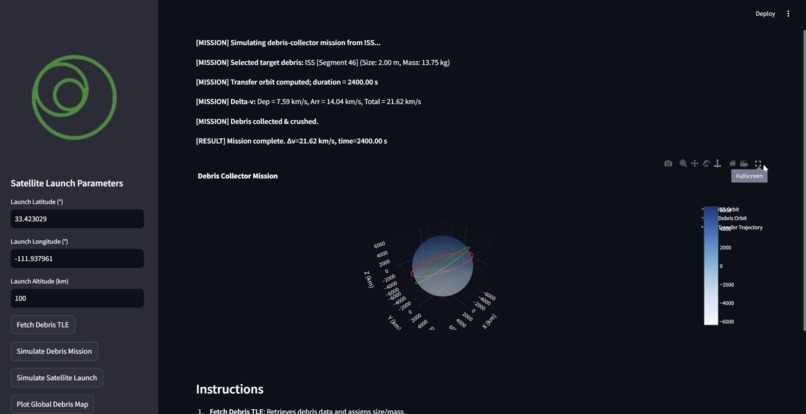
Simulating Satellite Launch
-
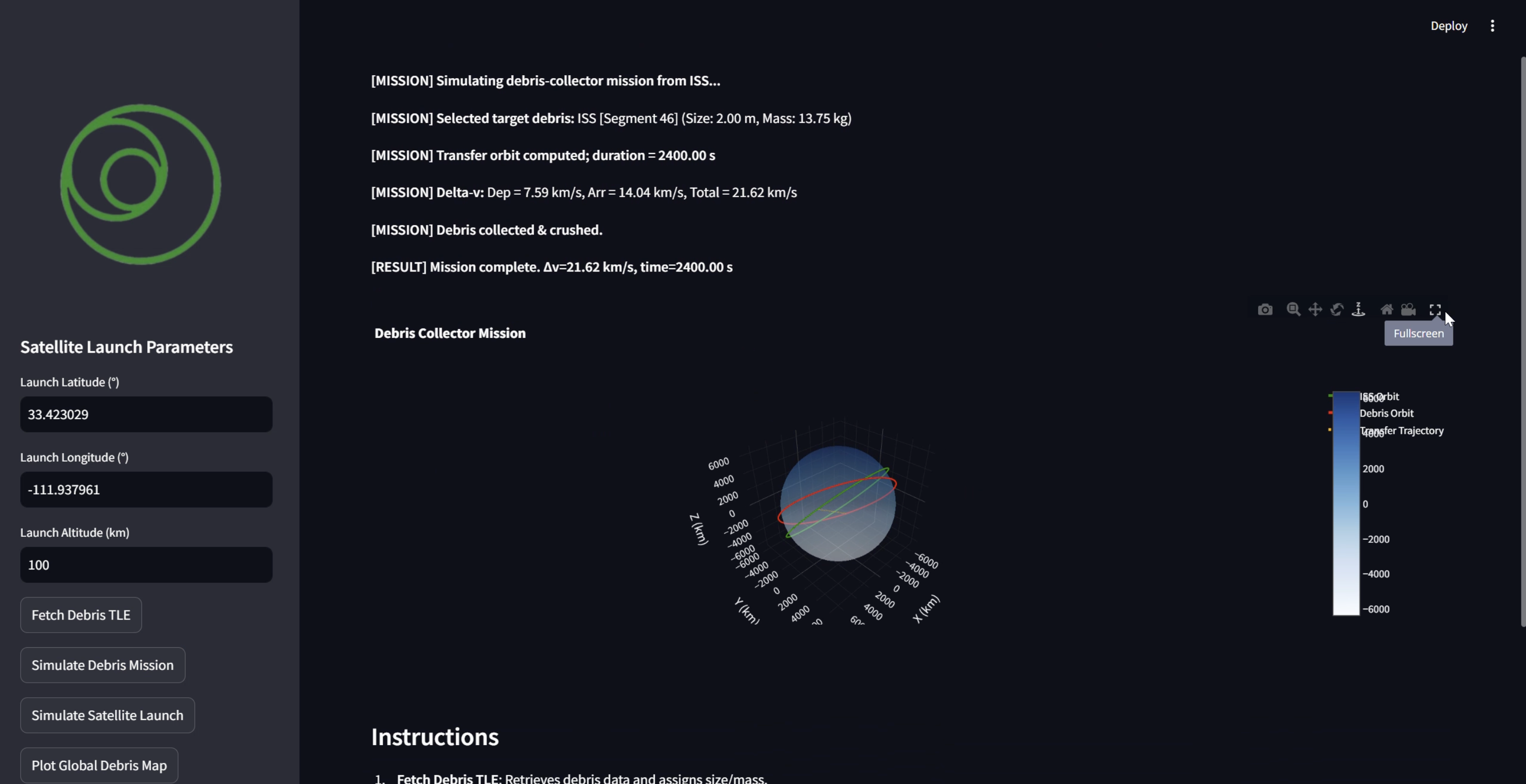
Cosmic is an autonomous, AI-powered debris collector system that launches from the International Space Station (ISS) to identify and capture critical space debris interfering with satellite launches and orbital operations. After each mission, the system autonomously returns to the ISS for refueling and maintenance. This ensures a sustainable, reusable debris removal strategy without the need for dedicated launch vehicles. The system focuses on removing debris that directly threatens optimal launch trajectories and operational satellites, effectively minimizing collision risks and enabling safer, more efficient space missions.
Inspiration
The increasing density of space debris presents a serious risk to active satellites, future launch missions, and the ISS. Even a single piece of debris can cause millions in damage and delays. While agencies like NASA and ESA have explored debris removal, many solutions require separate costly launches and are not reusable.
The idea behind Cosmic was to create an ISS-based, always-available collector that can be refueled and reused. This dramatically lowers mission costs and maximizes response efficiency, offering a smart, sustainable approach to active debris removal.
How We Built It
The system is built around a modular multi-agent AI architecture that operates in real time:
Trajectory Optimization AI Identifies the most critical debris based on orbital paths and planned launch trajectories using reinforcement learning and classical orbital mechanics (Hohmann transfers, Lambert solvers).
Navigation and Dispatch AI Plans and adjusts real-time launch and return paths from the ISS to target debris using A* and D* algorithms. This ensures collision avoidance and adaptive mission routing.
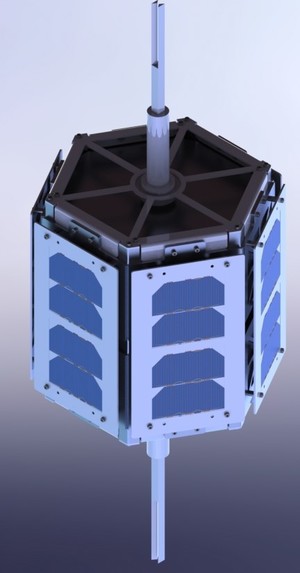
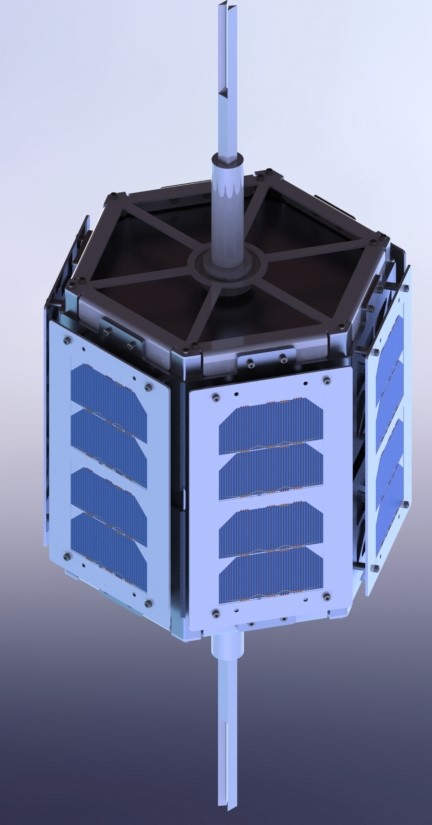
Execution and Control Agent Operates the robotic arm and propulsion system for physical debris collection and return operations.
Technologies Used:
Python (Poliastro, sgp4, NumPy, TensorFlow) AI simulation using OpenAI Gym and custom orbital physics environments Orbital data sourced from Celestrak and Space-Track Robotic modeling and visualization tools
Key Benefits
-Prevents at least one ISS debris avoidance maneuver annually (estimated $1 million saved per event) -Reduces risk of satellite collisions, potentially saving $100 million+ per satellite -Minimizes delays and reroutes for launch missions (estimated $5–10 million saved over time) -Reduces shielding and design redundancy requirements for future satellites -Enhances mission planning efficiency and reduces operational overhead -Projected total value saved over 5 years: over $110 million
Challenges
-Accurately simulating orbital trajectories and intercepts under real-world physics constraints -Designing a system that functions autonomously while meeting ISS safety protocols -Integrating reinforcement learning with dynamic orbital datasets -Ensuring sustainable long-term operations through refueling and reusable deployment
What's Next
Complete the simulation environment for real-time debris detection, targeting, and collection Integrate additional orbital data APIs for enhanced in-flight decision-making Build a high-fidelity hardware prototype with a functional robotic arm Pursue funding and partnerships with NASA, ESA, and commercial satellite operators Publish research papers and submit to international space debris mitigation challenges
Built With
- cad
- celetrak
- physics
- python
- space-track.org
- spg4
- visual-studio


Log in or sign up for Devpost to join the conversation.