
He wears a top hat and a monacle; and he always get his man.
Description and Motivation
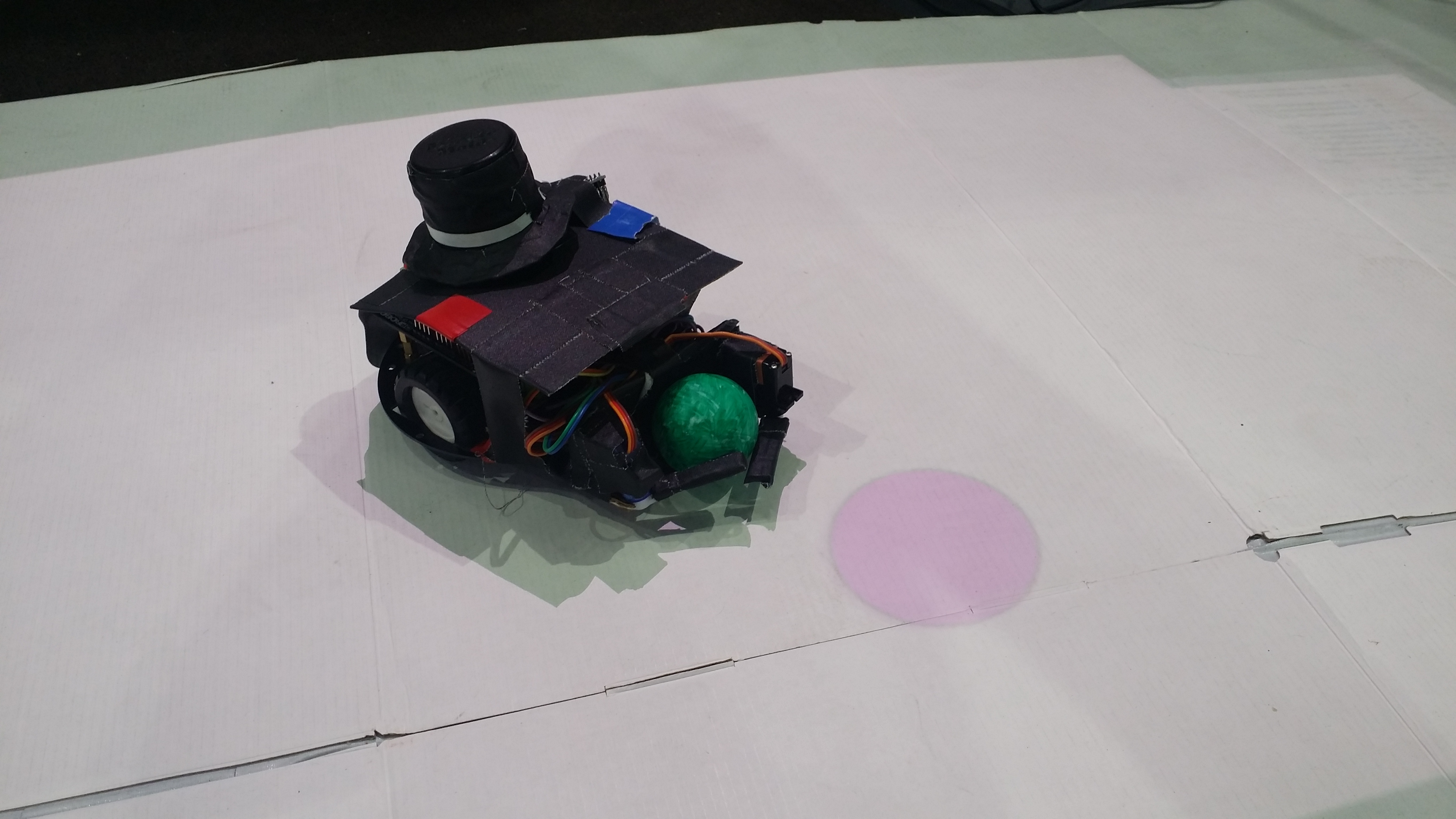
Alfred is a 2WD robot powered by an arduino, RF Tranceivers, a projector, an IR pen, a Wiimote, and the Microsoft Kinect V2. We started by projecting down an image of a desktop. Using the IR camera embedded in the Wiimote we can then use the IR pen as a mouse to draw paths for Alfred to trek.
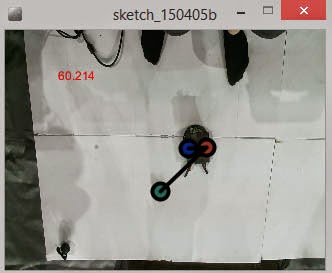
Using the Kinect sensor we implemented color tracking. Two different reference colors on Alfred were used to determine where he is going and oriented in the world. A third color was used to give Alfred a target to head towards. We then gave him servo arms to grab onto his ball once he was in range.
Challenges
Unfortunately our projector combined with the lighting of event produced a washed out image that produced quite a bit of noise in guiding Alfred. So we instead trained him to chase his trusty green ball Wilson.
Alfred's new life
Alfred now spends most his days chasing wilson and trying to grab him using his servo powered arms.

Log in or sign up for Devpost to join the conversation.