

Psss... we are nerds... just look for the GitHub below 😜
Inspiration
We’ve been going on holiday to Abruzzo for 11 years, and there we’ve noticed that mobile phones often have no signal during hikes. Without communication, even a person who is alive and nearby can remain unreachable. We are also passionate about drones and RC airplanes…
SkyRescue was created to bring connectivity into the search area using low-cost aircraft and radio hardware that many RC pilots already have.
What it does
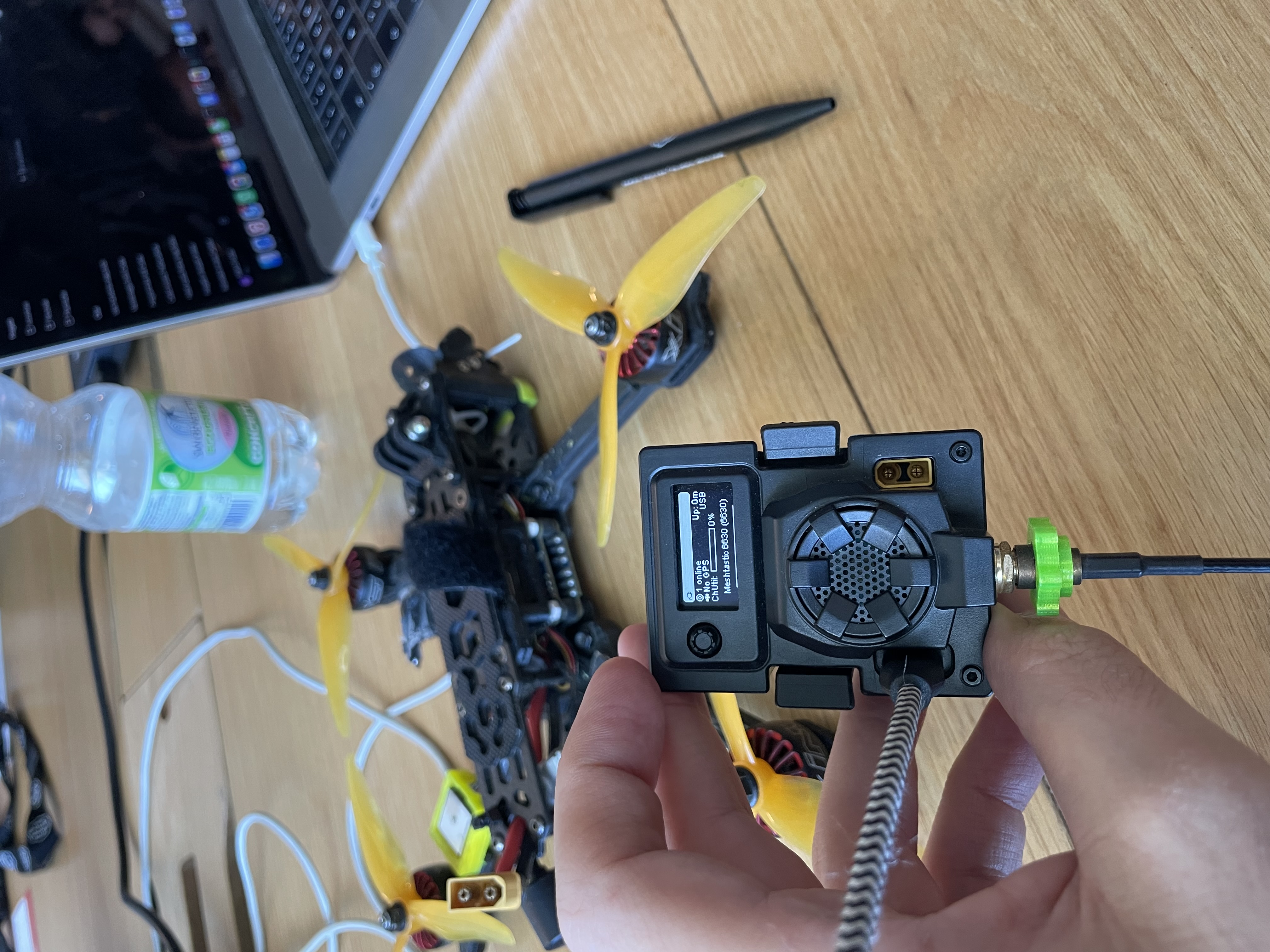
SkyRescue turns an RC airplane and FPV drones into a flying Meshtastic node.
It extends LoRa mesh coverage from the air, helping missing people, rescuers, and ground stations exchange position data and messages without cellular networks.
We adapt low-cost ExpressLRS-based hardware, which already uses LoRa chips, and convert it into Meshtastic-compatible nodes. The aircraft acts as an airborne bridge and sends useful data back to the ground station through radio telemetry or FPV/DJI workflows.
The backend runs on Scaleway. An OpenAI-based agent with OpenCraw helps rescuers collect and organize operational information. ElevenLabs is used for voice translation during emergency communication.
How we built it
We combined Meshtastic and ExpressLRS hardware (both are LoRa-based!), and integrated with INAV (an open source firmware for FPV drones and RC plane). We put an OpenCraw node on Scaleway (thanks for credits !! ❤️) powered by OpenAI and ElevenLabs.
The aircraft provides altitude and mobility, Meshtastic provides off-grid communication, and the backend helps rescue teams understand and manage the information coming from the field.
Challenges we ran into
TIME! 😂
And also the "HAM" stuff (power amplify)
Ah, and also... i forgot a screwdriver :'(
Accomplishments that we're proud of
We are proud of turning affordable RC hardware into a possible emergency communication tool.
SkyRescue shows that hobbyist aircraft, ExpressLRS radios, LoRa chips, and open-source software can be reused to support real search and rescue operations.
What we learned
~That we can win with the power of friendship~
We learned that a flying communication node can be extremely useful in remote areas because altitude improves radio coverage.
We also learned that rescue technology must be simple, low-cost, reliable, and easy to deploy under pressure.
What's next for SkyRescue
Next, we want to improve INAV-Meshtastic integration, test real radio range at different altitudes, build a rescue dashboard, support more ExpressLRS hardware, and coordinate multiple aircraft as a flying mesh network.
Built With
- ai
- docker
- esp32
- openai
- platformio
- stm32
- vscode

Log in or sign up for Devpost to join the conversation.