-
-

Team Photo
-

Cane
-

Cane CAD Design
-
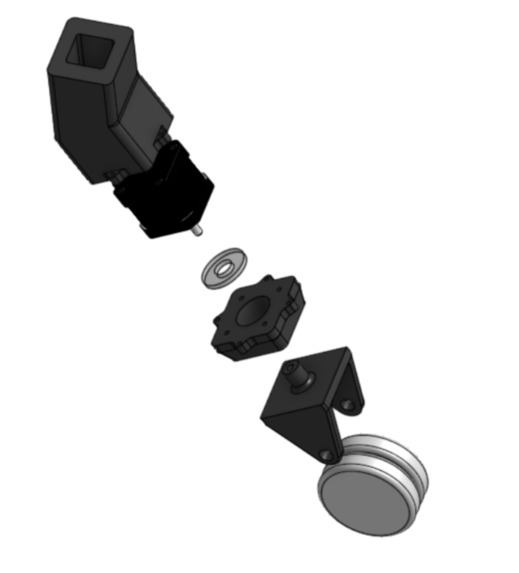
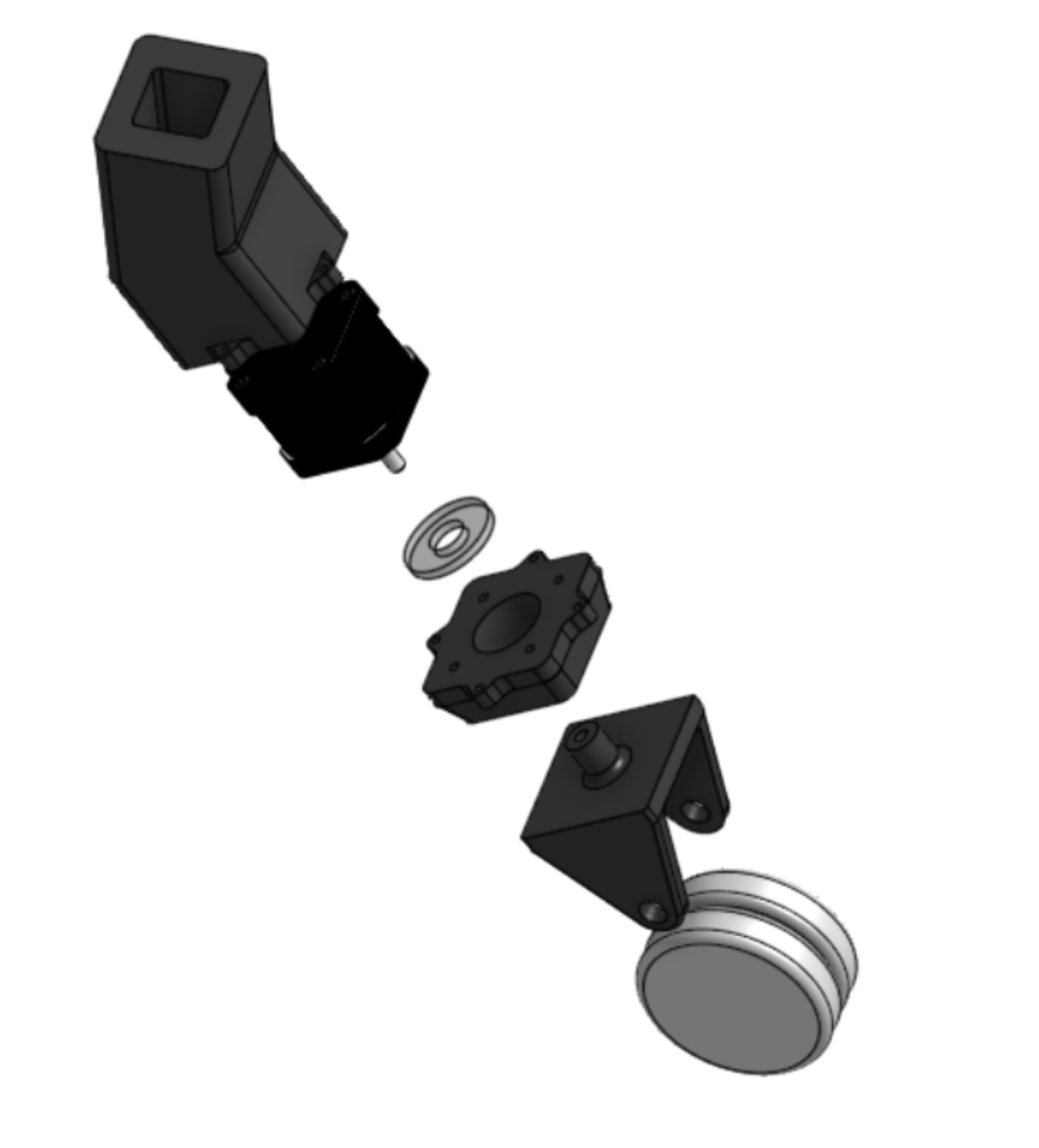
Wheel components
-
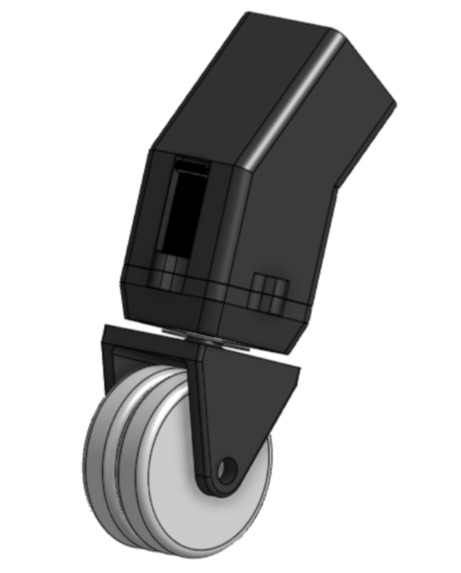
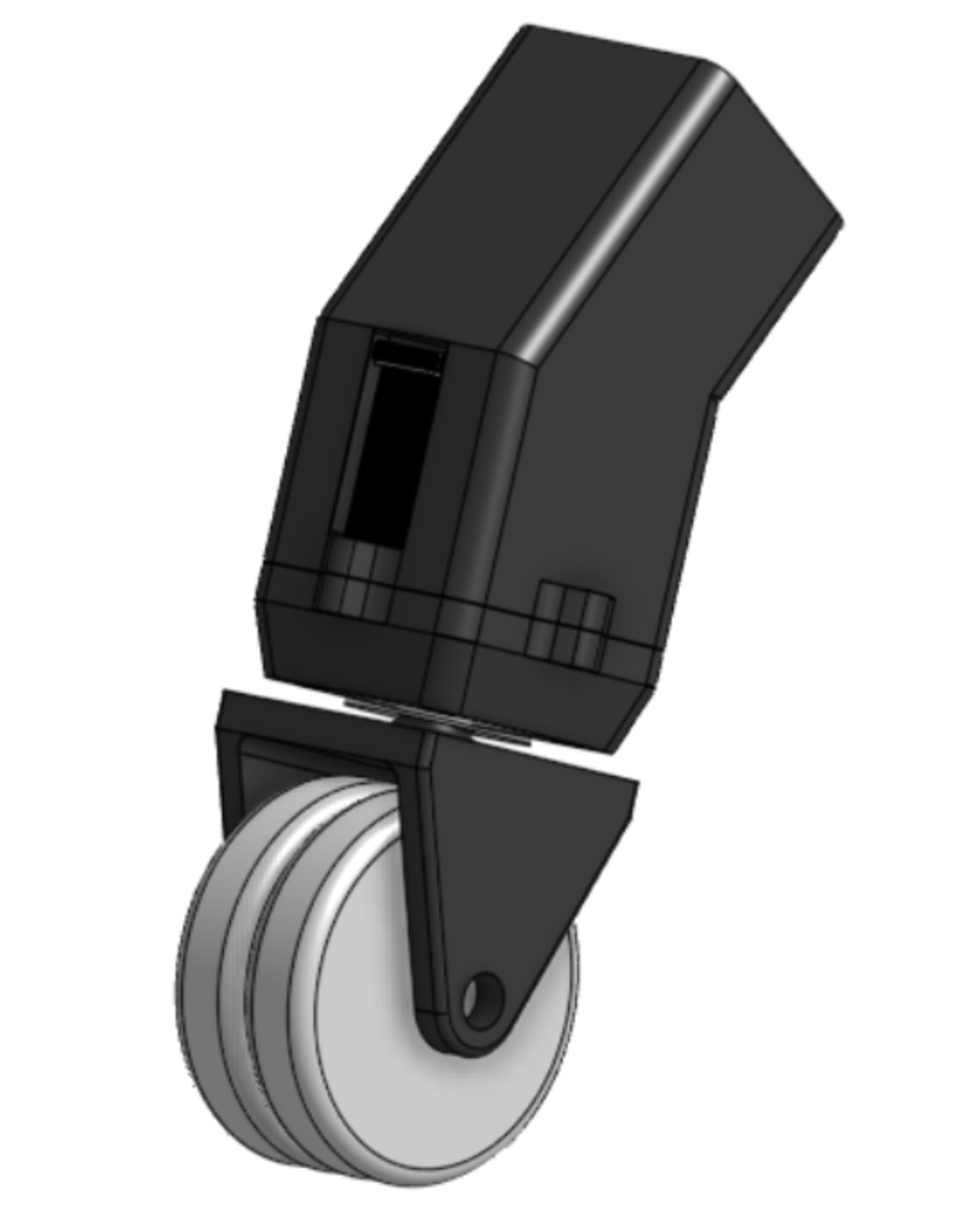
Wheel close up



Inspiration
According to the National Institutes of Health (2021), age-related visual impairment and blindness remain prevalent and increasing public health concerns. Despite this, the traditional white cane has seen minimal technological evolution, functioning primarily as a passive contact-based detection tool without directional intelligence. After witnessing a blind individual repeatedly circle an obstacle due to lack of navigational feedback, we identified a critical gap in assistive mobility: detection without guidance. Echo Pro was conceived to address this gap by transforming the conventional cane into an intelligent, real-time navigation system grounded in applied AI and embedded systems research.
What it does
Echo Pro is an AI-powered, self-guided mobility device built on a Raspberry Pi edge-computing platform. A forward-mounted camera streams live video to a deployed machine learning model that performs real-time human and object detection directly on-device. Using spatial analysis of bounding box size, position, and orientation within the frame, the system computes directional avoidance vectors. A motorized wheel assembly at the base of the cane dynamically adjusts its steering angle to guide the user safely around obstacles while maintaining forward motion. After a calibrated five-second avoidance maneuver, the wheel autonomously re-centers to restore the user’s original trajectory, ensuring continuous and stable navigation.
How we built it
Our team comprised of a mechanics group and electronic group. The mechanics groups focused on the design of our cane, how we would fit the different components of our cane together for the conviency of user. Our mechanics team worked on Onshape to design the handle of our cane, a connector part that holds the motor and the wheel at the bottom of our cane, and a container part that holds our electronics within the cane. Our electronic team worked on configuring the Raspberry Pi board, soldering camera to pi board and pi board to motor. We configured the Raspberry Pi board using python and Viam machine learning model to detect human and object on and adjust angle of wheel accordingly.
Challenges we ran into
The biggest challenge we ran into was working with the Raspberry Pi board, setting it up and programming it. With our team primary strength in mechanics, we faced challenges with the software aspect of the project. However, we are very proud that we have sources to consult with such as representatives from Viam and different AI platform to help with. We were able to set up the machine learning model on our project. We implemented Python code to steer the wheel in order to avoid obstacle and direct user to correct path.
Accomplishments that we're proud of
We engineered a functional, AI-enabled guidance cane capable of autonomous obstacle avoidance using on-device inference, without reliance on cloud processing. This demonstrates scalable, privacy-preserving assistive technology with real-world deployment potential.
What we learned
We gained hands-on experience in edge AI/ML deployment, hardware-software integration, and interdisciplinary collaboration between mechanical and electronic systems engineering. Most importantly, we learned how to translate a real-world accessibility problem into a technically viable, user-centered solution.
What's next for Echo Pro
Our next phase is evolving Echo Pro from reactive obstacle avoidance to proactive navigation assistance-effectively integrating turn-by-turn directional guidance similar to GPS-based systems into a mobility cane. We plan to expand and diversify our training dataset for improved environmental robustness, integrate multi-sensor fusion (e.g., ultrasonic and LiDAR) for enhanced spatial awareness, implement haptic feedback for intuitive user communication, and conduct structured pilot testing with visually impaired users. Our long-term vision is to establish Echo Pro as a next-generation intelligent mobility platform redefining assistive navigation through scalable, research-driven AI innovation.
Built With
- deflex
- onshape
- python
- viam



Log in or sign up for Devpost to join the conversation.