Inspiration
What it does
How we built it
Challenges we ran into
Accomplishments that we're proud of
What we learned
What's next for AI-Based Traffic Management
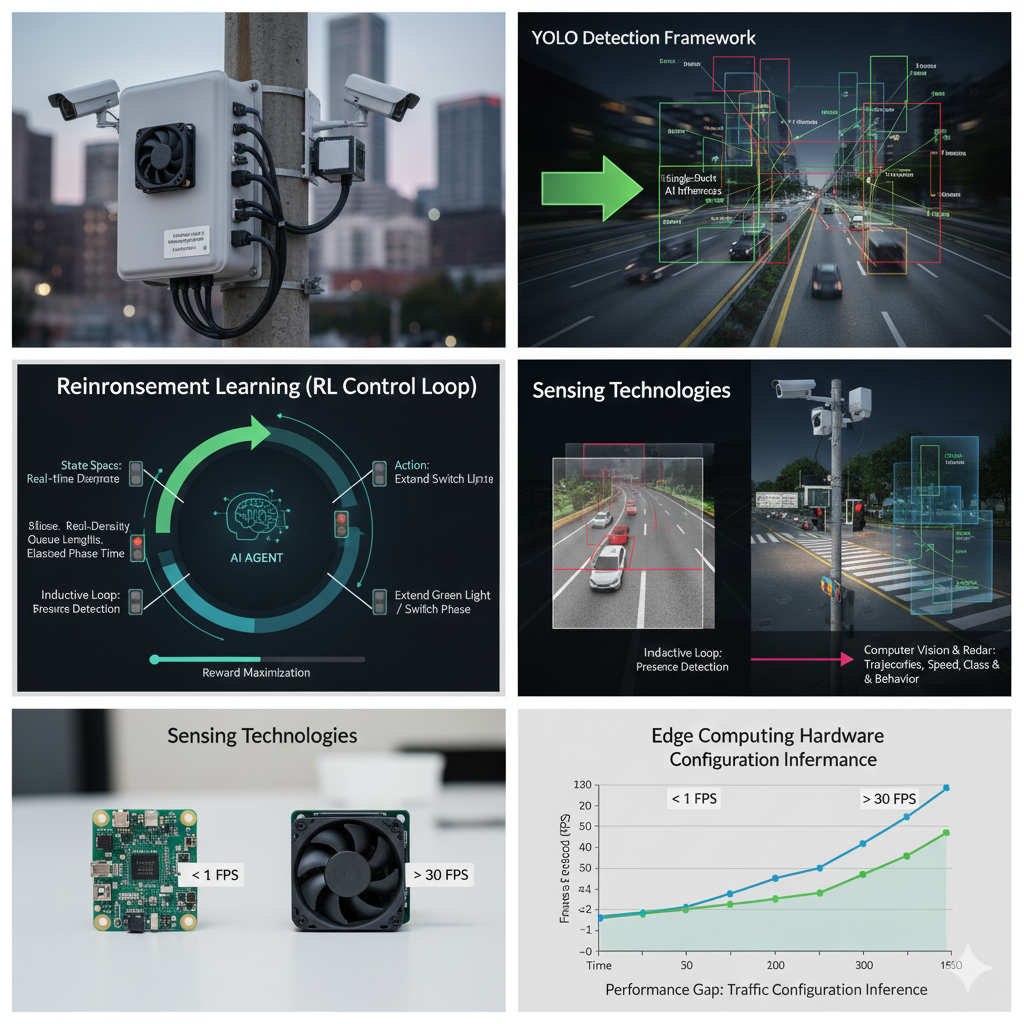
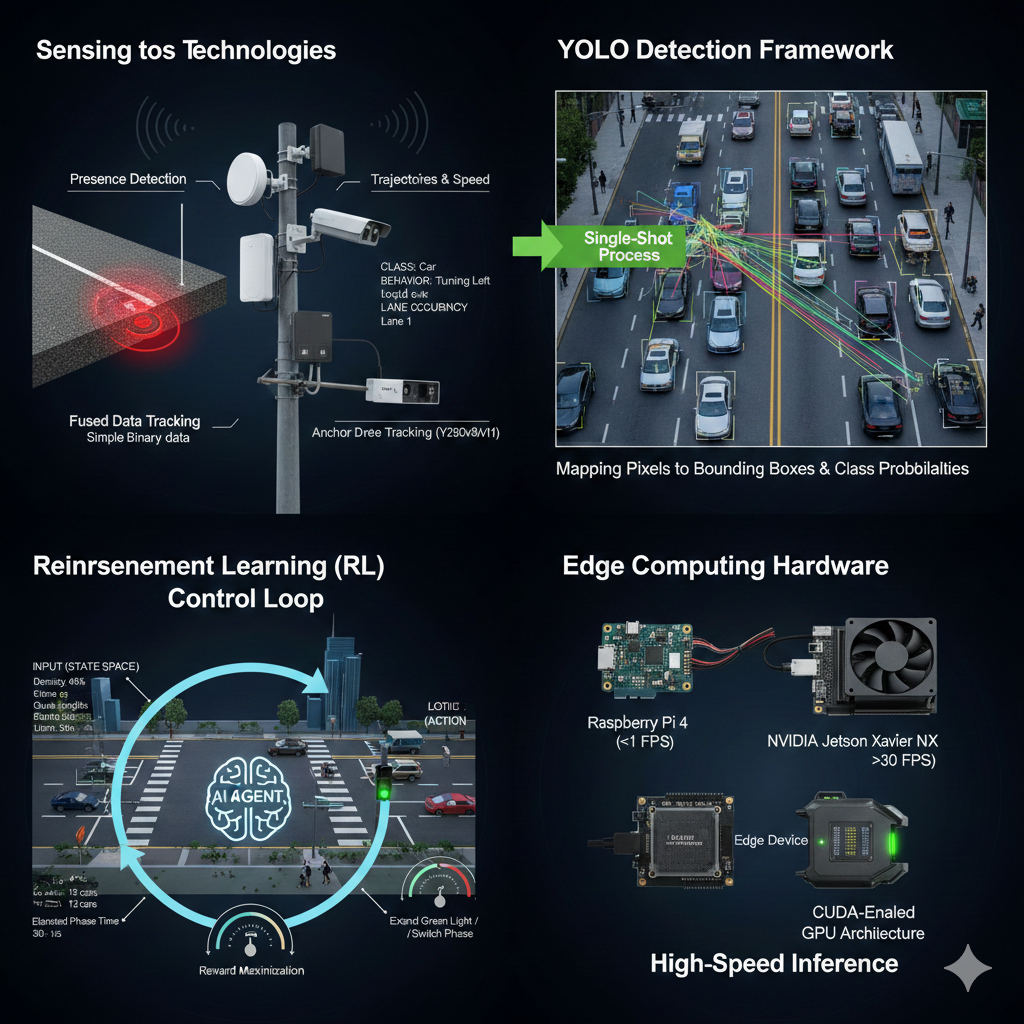
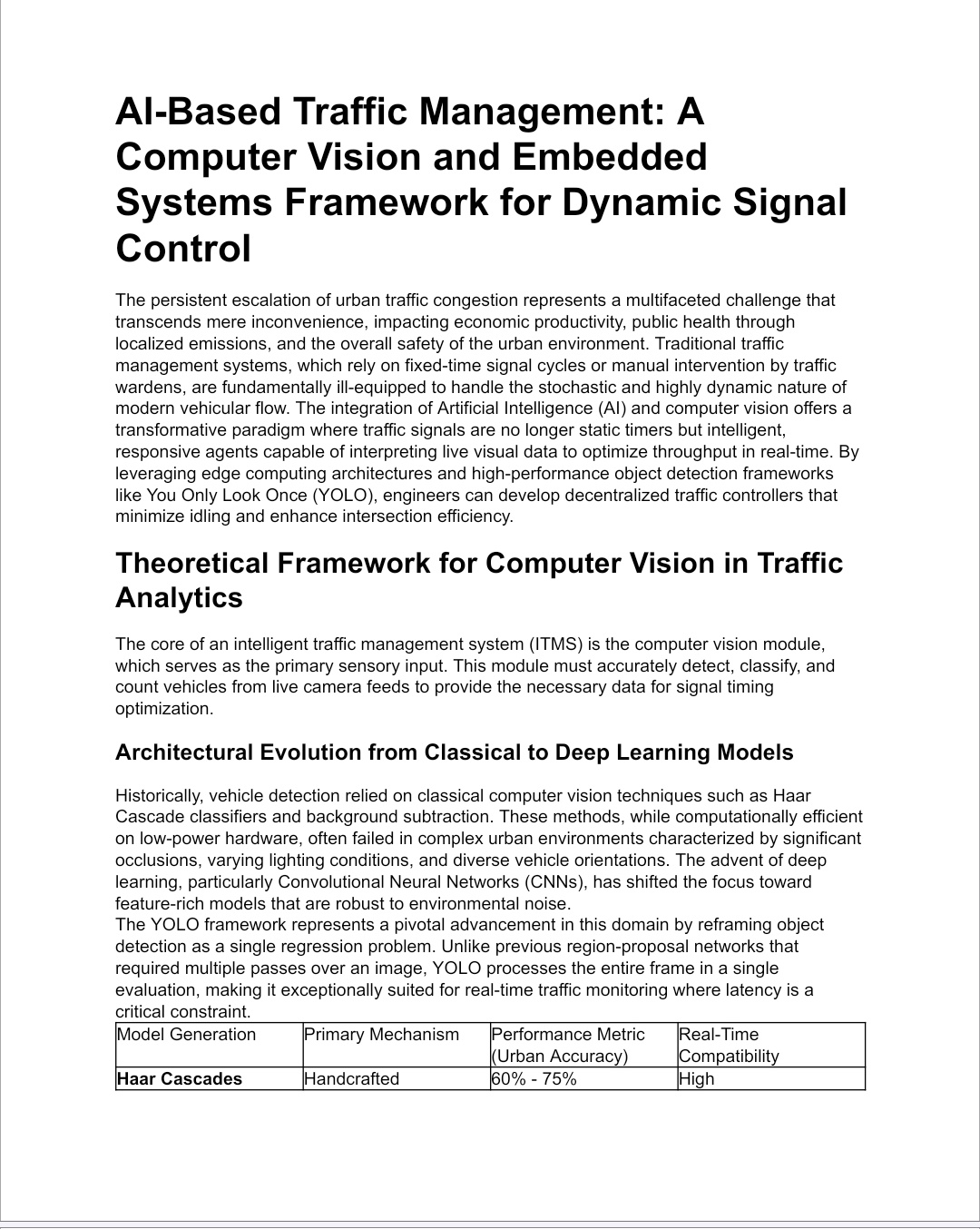
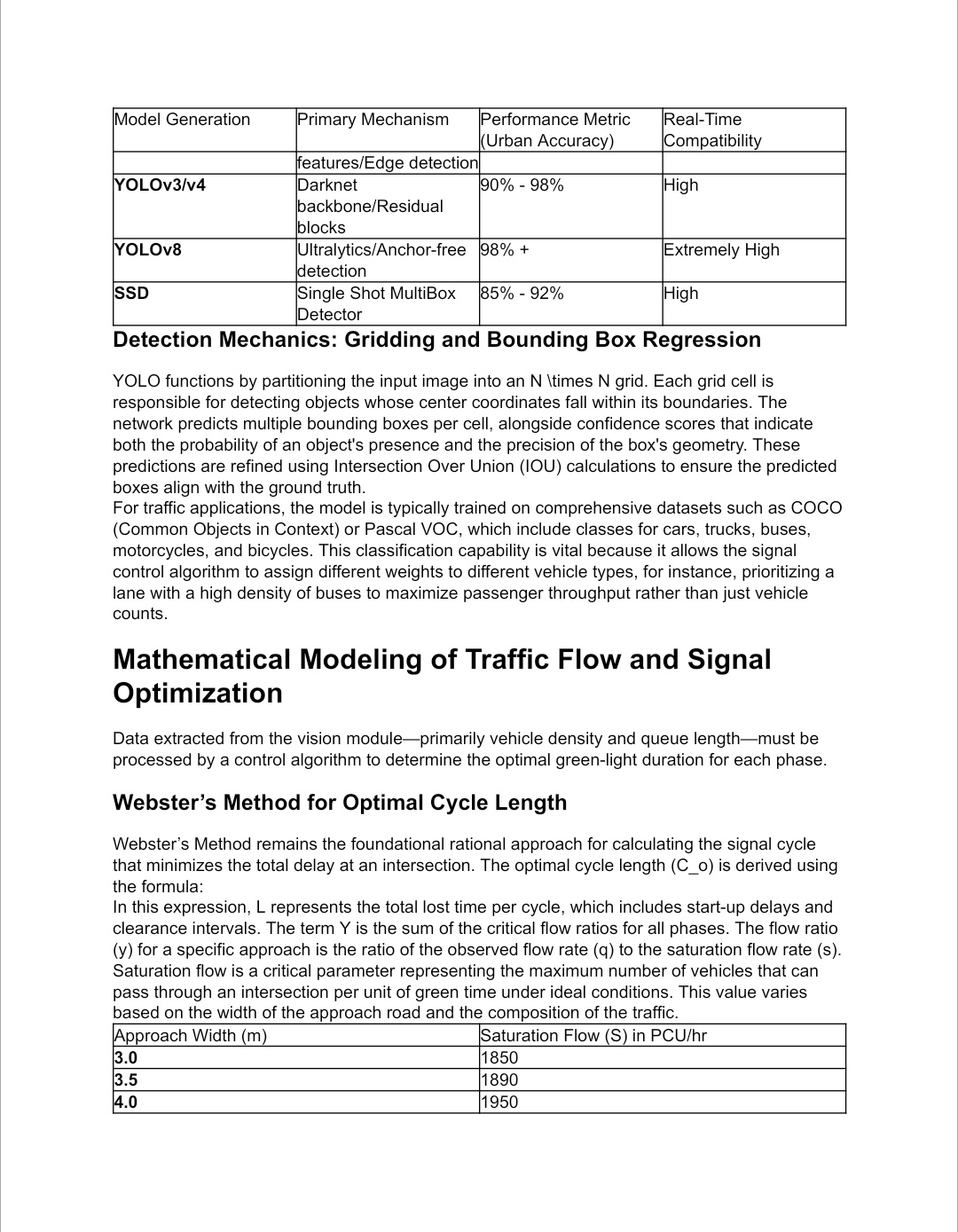
The persistent escalation of urban traffic congestion represents a multifaceted challenge that transcends mere inconvenience, impacting economic productivity, public health through localized emissions, and the overall safety of the urban environment. Traditional traffic management systems, which rely on fixed-time signal cycles or manual intervention by traffic wardens, are fundamentally ill-equipped to handle the stochastic and highly dynamic nature of modern vehicular flow. The integration of Artificial Intelligence (AI) and computer vision offers a transformative paradigm where traffic signals are no longer static timers but intelligent, responsive agents capable of interpreting live visual data to optimize throughput in real-time. By leveraging edge computing architectures and high-performance object detection frameworks like You Only Look Once (YOLO), engineers can develop decentralized traffic controllers that minimize idling and enhance intersection efficiency. Theoretical Framework for Computer Vision in Traffic Analytics The core of an intelligent traffic management system (ITMS) is the computer vision module, which serves as the primary sensory input. This module must accurately detect, classify, and count vehicles from live camera feeds to provide the necessary data for signal timing optimization. Architectural Evolution from Classical to Deep Learning Models Historically, vehicle detection relied on classical computer vision techniques such as Haar Cascade classifiers and background subtraction. These methods, while computationally efficient on low-power hardware, often failed in complex urban environments characterized by significant occlusions, varying lighting conditions, and diverse vehicle orientations. The advent of deep learning, particularly Convolutional Neural Networks (CNNs), has shifted the focus toward feature-rich models that are robust to environmental noise. The YOLO framework represents a pivotal advancement in this domain by reframing object detection as a single regression problem. Unlike previous region-proposal networks that required multiple passes over an image, YOLO processes the entire frame in a single evaluation, making it exceptionally suited for real-time traffic monitoring where latency is a critical constraint.
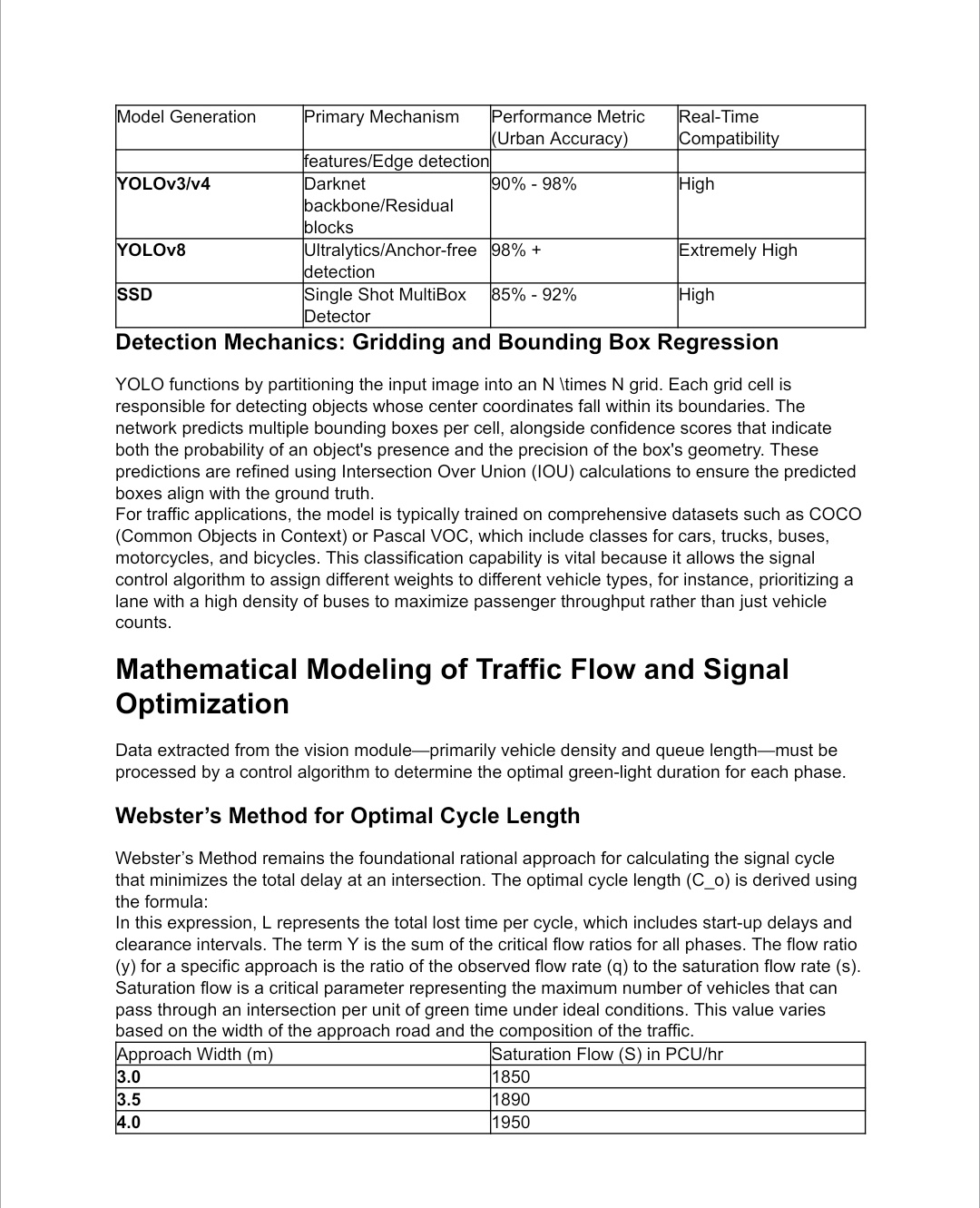
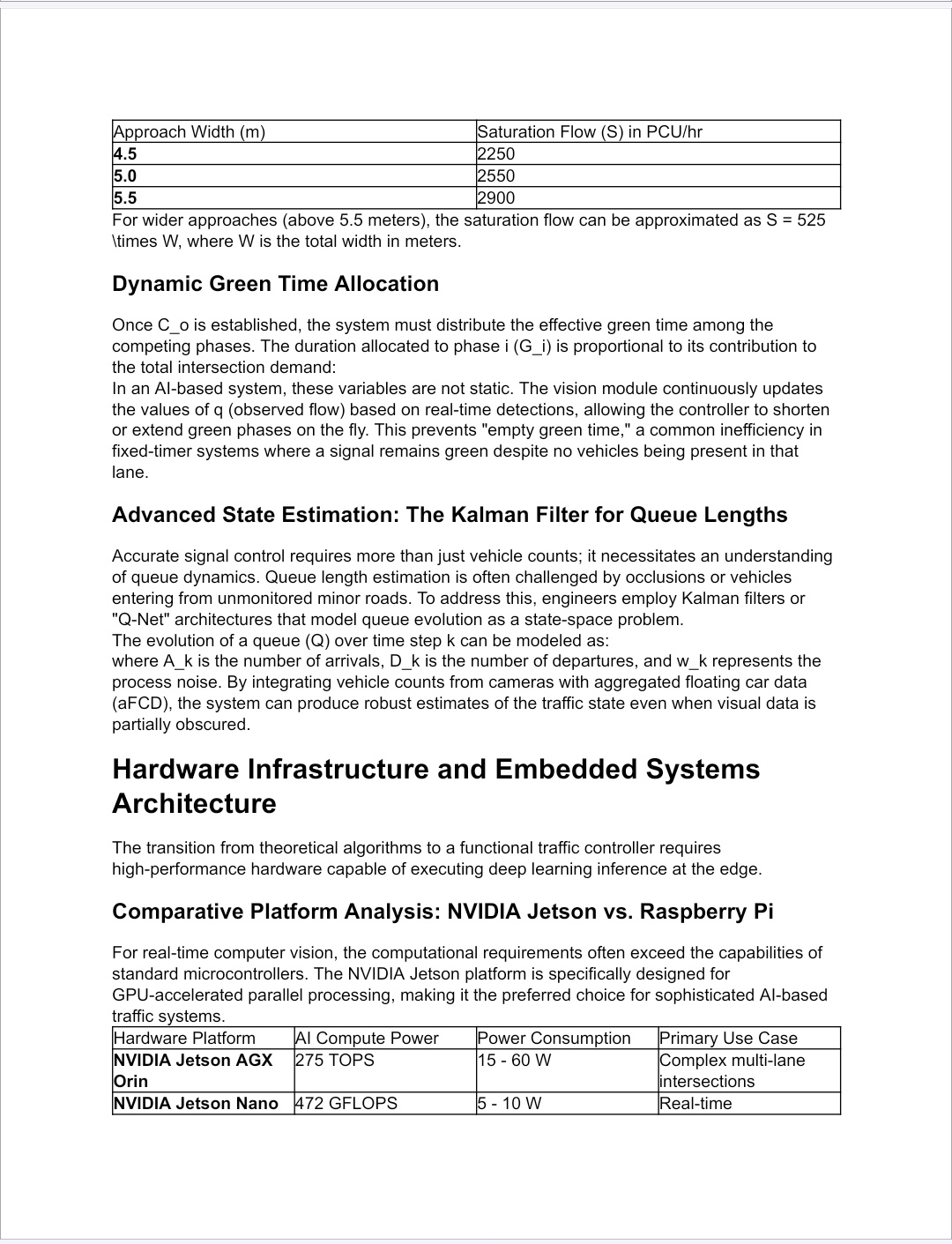
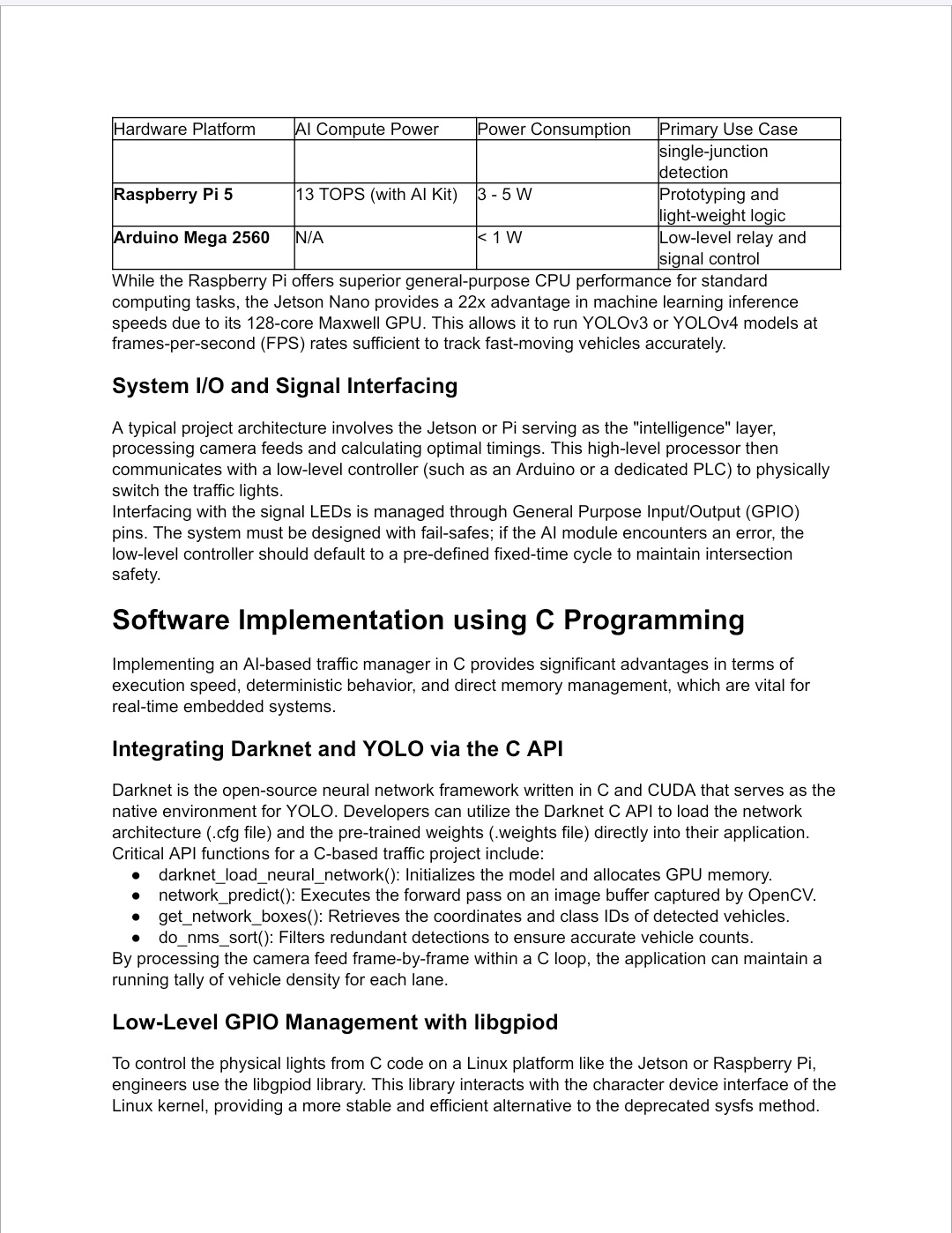
Detection Mechanics: Gridding and Bounding Box Regression YOLO functions by partitioning the input image into an N \times N grid. Each grid cell is responsible for detecting objects whose center coordinates fall within its boundaries. The network predicts multiple bounding boxes per cell, alongside confidence scores that indicate both the probability of an object's presence and the precision of the box's geometry. These predictions are refined using Intersection Over Union (IOU) calculations to ensure the predicted boxes align with the ground truth. For traffic applications, the model is typically trained on comprehensive datasets such as COCO (Common Objects in Context) or Pascal VOC, which include classes for cars, trucks, buses, motorcycles, and bicycles. This classification capability is vital because it allows the signal control algorithm to assign different weights to different vehicle types, for instance, prioritizing a lane with a high density of buses to maximize passenger throughput rather than just vehicle counts. Mathematical Modeling of Traffic Flow and Signal Optimization Data extracted from the vision module—primarily vehicle density and queue length—must be processed by a control algorithm to determine the optimal green-light duration for each phase. Webster’s Method for Optimal Cycle Length Webster’s Method remains the foundational rational approach for calculating the signal cycle that minimizes the total delay at an intersection. The optimal cycle length (C_o) is derived using the formula: In this expression, L represents the total lost time per cycle, which includes start-up delays and clearance intervals. The term Y is the sum of the critical flow ratios for all phases. The flow ratio (y) for a specific approach is the ratio of the observed flow rate (q) to the saturation flow rate (s). Saturation flow is a critical parameter representing the maximum number of vehicles that can pass through an intersection per unit of green time under ideal conditions. This value varies based on the width of the approach road and the composition of the traffic.For wider approaches (above 5.5 meters), the saturation flow can be approximated as S = 525 \times W, where W is the total width in meters. Dynamic Green Time Allocation Once C_o is established, the system must distribute the effective green time among the competing phases. The duration allocated to phase i (G_i) is proportional to its contribution to the total intersection demand: In an AI-based system, these variables are not static. The vision module continuously updates the values of q (observed flow) based on real-time detections, allowing the controller to shorten or extend green phases on the fly. This prevents "empty green time," a common inefficiency in fixed-timer systems where a signal remains green despite no vehicles being present in that lane. Advanced State Estimation: The Kalman Filter for Queue Lengths Accurate signal control requires more than just vehicle counts; it necessitates an understanding of queue dynamics. Queue length estimation is often challenged by occlusions or vehicles entering from unmonitored minor roads. To address this, engineers employ Kalman filters or "Q-Net" architectures that model queue evolution as a state-space problem. The evolution of a queue (Q) over time step k can be modeled as: where A_k is the number of arrivals, D_k is the number of departures, and w_k represents the process noise. By integrating vehicle counts from cameras with aggregated floating car data (aFCD), the system can produce robust estimates of the traffic state even when visual data is partially obscured. Hardware Infrastructure and Embedded Systems Architecture The transition from theoretical algorithms to a functional traffic controller requires high-performance hardware capable of executing deep learning inference at the edge. Comparative Platform Analysis: NVIDIA Jetson vs. Raspberry Pi For real-time computer vision, the computational requirements often exceed the capabilities of standard microcontrollers. The NVIDIA Jetson platform is specifically designed for GPU-accelerated parallel processing, making it the preferred choice for sophisticated AI-based traffic systems.
While the Raspberry Pi offers superior general-purpose CPU performance for standard computing tasks, the Jetson Nano provides a 22x advantage in machine learning inference speeds due to its 128-core Maxwell GPU. This allows it to run YOLOv3 or YOLOv4 models at frames-per-second (FPS) rates sufficient to track fast-moving vehicles accurately. System I/O and Signal Interfacing A typical project architecture involves the Jetson or Pi serving as the "intelligence" layer, processing camera feeds and calculating optimal timings. This high-level processor then communicates with a low-level controller (such as an Arduino or a dedicated PLC) to physically switch the traffic lights. Interfacing with the signal LEDs is managed through General Purpose Input/Output (GPIO) pins. The system must be designed with fail-safes; if the AI module encounters an error, the low-level controller should default to a pre-defined fixed-time cycle to maintain intersection safety. Software Implementation using C Programming Implementing an AI-based traffic manager in C provides significant advantages in terms of execution speed, deterministic behavior, and direct memory management, which are vital for real-time embedded systems. Integrating Darknet and YOLO via the C API Darknet is the open-source neural network framework written in C and CUDA that serves as the native environment for YOLO. Developers can utilize the Darknet C API to load the network architecture (.cfg file) and the pre-trained weights (.weights file) directly into their application. Critical API functions for a C-based traffic project include: darknet_load_neural_network(): Initializes the model and allocates GPU memory. network_predict(): Executes the forward pass on an image buffer captured by OpenCV. get_network_boxes(): Retrieves the coordinates and class IDs of detected vehicles. do_nms_sort(): Filters redundant detections to ensure accurate vehicle counts. By processing the camera feed frame-by-frame within a C loop, the application can maintain a running tally of vehicle density for each lane. Low-Level GPIO Management with libgpiod To control the physical lights from C code on a Linux platform like the Jetson or Raspberry Pi, engineers use the libgpiod library. This library interacts with the character device interface of the Linux kernel, providing a more stable and efficient alternative to the deprecated sysfs method. A typical C function to set a signal state would follow this logical flow: Open the GPIO chip (e.g., /dev/gpiochip4). Request the specific line associated with the red, yellow, or green LED. Set the line value to 1 (Active/High) or 0 (Inactive/Low). Release the line and close the chip upon program termination. For higher-level abstractions on the Raspberry Pi, the wiringPi library is commonly used for its intuitive syntax.
include
// BCM Pin Mapping
define RED_LIGHT 13
define YELLOW_LIGHT 12
define GREEN_LIGHT 14
void update_signal(int signal_pin, int duration_ms) { digitalWrite(signal_pin, HIGH); delay(duration_ms); digitalWrite(signal_pin, LOW); }
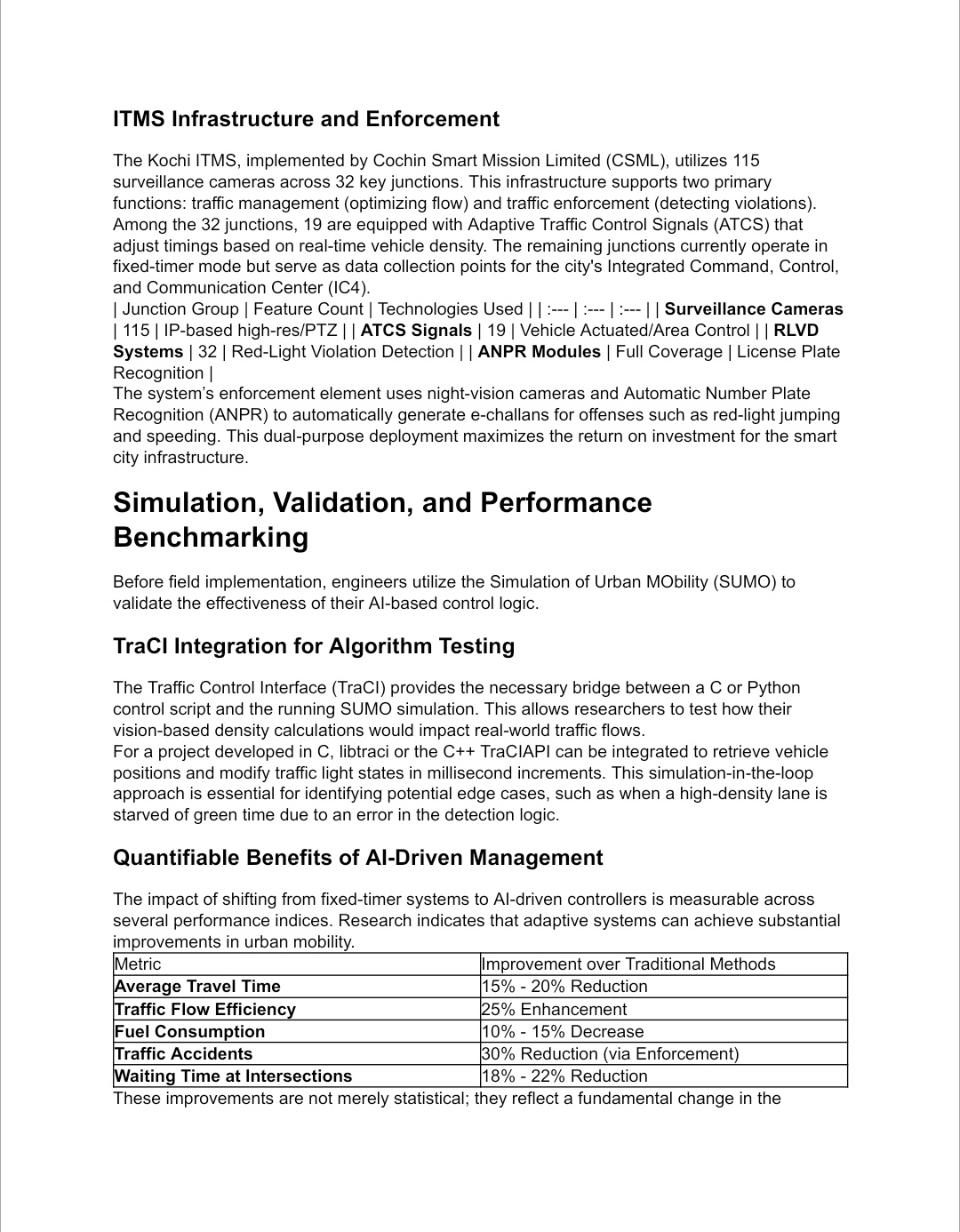
Regional Case Study: The Kochi Intelligent Traffic Management System Kochi, Kerala, represents a primary example of large-scale ITMS implementation in the Indian context. The city's unique geography and high vehicle-to-road-width ratio make it an ideal testbed for vision-based adaptive signaling. Traffic Congestion Patterns and PCU Metrics Extensive surveys in Kochi have identified critical bottlenecks along major east-west corridors, particularly at intersections like Vytilla and Kaloor. The peak hour traffic volume on MG Road exceeds 4,000 Passenger Car Units (PCU), while Shanmugham Road handles approximately 3,700 PCU.
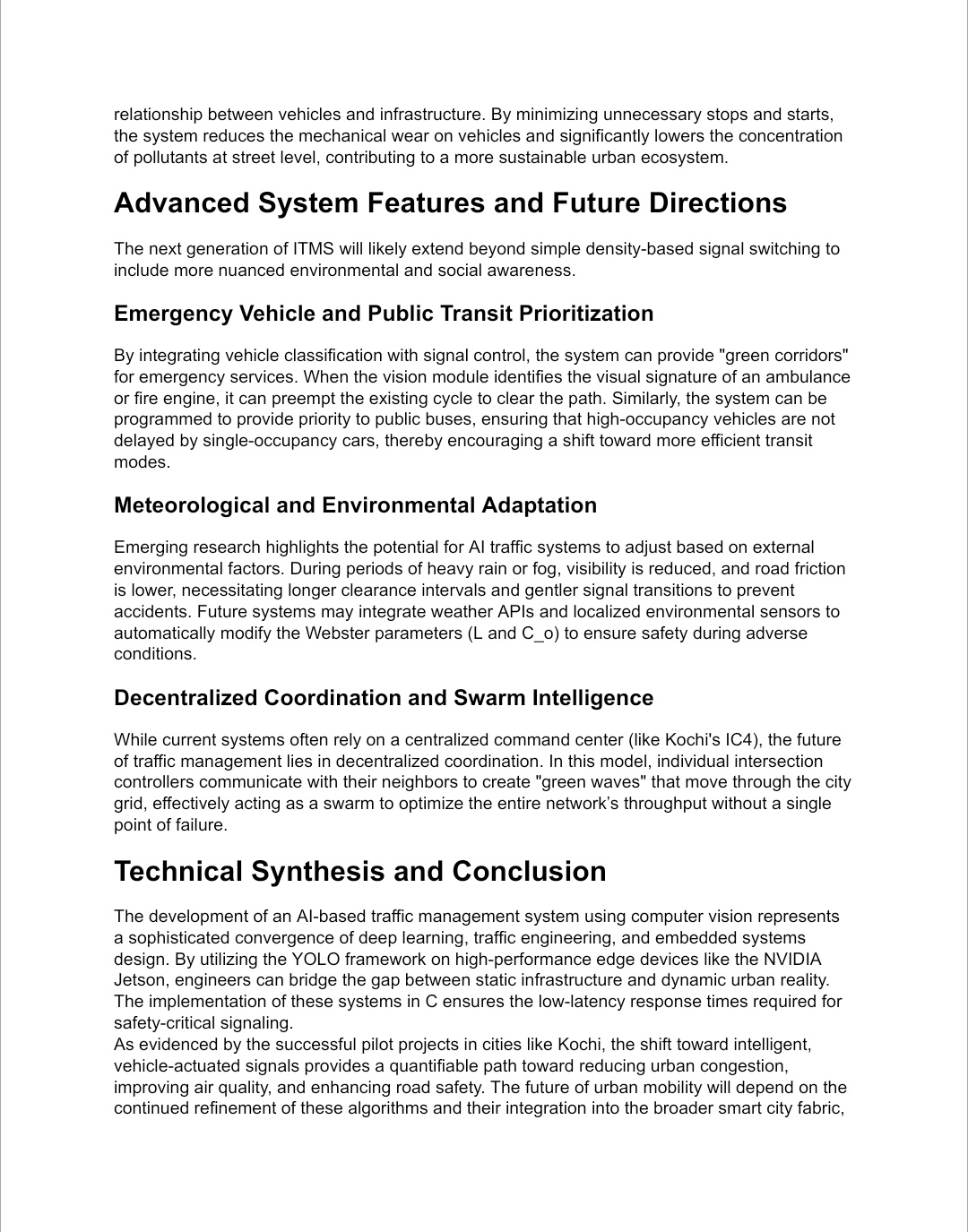
The high share of two-wheelers (up to 46% on some corridors) introduces significant complexity for computer vision models, as these vehicles often filter between lanes and cluster at the front of stop lines, requiring high-resolution detection and specialized counting algorithms. ITMS Infrastructure and Enforcement The Kochi ITMS, implemented by Cochin Smart Mission Limited (CSML), utilizes 115 surveillance cameras across 32 key junctions. This infrastructure supports two primary functions: traffic management (optimizing flow) and traffic enforcement (detecting violations). Among the 32 junctions, 19 are equipped with Adaptive Traffic Control Signals (ATCS) that adjust timings based on real-time vehicle density. The remaining junctions currently operate in fixed-timer mode but serve as data collection points for the city's Integrated Command, Control, and Communication Center (IC4). | Junction Group | Feature Count | Technologies Used | | :--- | :--- | :--- | | Surveillance Cameras | 115 | IP-based high-res/PTZ | | ATCS Signals | 19 | Vehicle Actuated/Area Control | | RLVD Systems | 32 | Red-Light Violation Detection | | ANPR Modules | Full Coverage | License Plate Recognition | The system’s enforcement element uses night-vision cameras and Automatic Number Plate Recognition (ANPR) to automatically generate e-challans for offenses such as red-light jumping and speeding. This dual-purpose deployment maximizes the return on investment for the smart city infrastructure. Simulation, Validation, and Performance Benchmarking Before field implementation, engineers utilize the Simulation of Urban MObility (SUMO) to validate the effectiveness of their AI-based control logic. TraCI Integration for Algorithm Testing The Traffic Control Interface (TraCI) provides the necessary bridge between a C or Python control script and the running SUMO simulation. This allows researchers to test how their vision-based density calculations would impact real-world traffic flows. For a project developed in C, libtraci or the C++ TraCIAPI can be integrated to retrieve vehicle positions and modify traffic light states in millisecond increments. This simulation-in-the-loop approach is essential for identifying potential edge cases, such as when a high-density lane is starved of green time due to an error in the detection logic. Quantifiable Benefits of AI-Driven Management The impact of shifting from fixed-timer systems to AI-driven controllers is measurable across several performance indices. Research indicates that adaptive systems can achieve substantial improvements in urban mobility.
These improvements are not merely statistical; they reflect a fundamental change in the relationship between vehicles and infrastructure. By minimizing unnecessary stops and starts, the system reduces the mechanical wear on vehicles and significantly lowers the concentration of pollutants at street level, contributing to a more sustainable urban ecosystem. Advanced System Features and Future Directions The next generation of ITMS will likely extend beyond simple density-based signal switching to include more nuanced environmental and social awareness. Emergency Vehicle and Public Transit Prioritization By integrating vehicle classification with signal control, the system can provide "green corridors" for emergency services. When the vision module identifies the visual signature of an ambulance or fire engine, it can preempt the existing cycle to clear the path. Similarly, the system can be programmed to provide priority to public buses, ensuring that high-occupancy vehicles are not delayed by single-occupancy cars, thereby encouraging a shift toward more efficient transit modes. Meteorological and Environmental Adaptation Emerging research highlights the potential for AI traffic systems to adjust based on external environmental factors. During periods of heavy rain or fog, visibility is reduced, and road friction is lower, necessitating longer clearance intervals and gentler signal transitions to prevent accidents. Future systems may integrate weather APIs and localized environmental sensors to automatically modify the Webster parameters (L and C_o) to ensure safety during adverse conditions. Decentralized Coordination and Swarm Intelligence While current systems often rely on a centralized command center (like Kochi's IC4), the future of traffic management lies in decentralized coordination. In this model, individual intersection controllers communicate with their neighbors to create "green waves" that move through the city grid, effectively acting as a swarm to optimize the entire network’s throughput without a single point of failure. Technical Synthesis and Conclusion The development of an AI-based traffic management system using computer vision represents a sophisticated convergence of deep learning, traffic engineering, and embedded systems design. By utilizing the YOLO framework on high-performance edge devices like the NVIDIA Jetson, engineers can bridge the gap between static infrastructure and dynamic urban reality. The implementation of these systems in C ensures the low-latency response times required for safety-critical signaling. As evidenced by the successful pilot projects in cities like Kochi, the shift toward intelligent, vehicle-actuated signals provides a quantifiable path toward reducing urban congestion, improving air quality, and enhancing road safety. The future of urban mobility will depend on the continued refinement of these algorithms and their integration into the broader smart city fabric, creating a responsive environment where traffic flows as an optimized, data-driven utility. Works cited
- Ai-Based Traffic Controller Using Computer Vision, https://www.openjournals.ijaar.org/index.php/gjaitd/article/download/382/415/1220 2. AI BASED TRAFFIC MANAGEMENT SYSTEM - ijrpr, https://ijrpr.com/uploads/V6ISSUE4/IJRPR42832.pdf 3. Traffic Management Using Artificial Intelligence - IJNRD, https://www.ijnrd.org/papers/IJNRD2506021.pdf 4. (PDF) AI Based Traffic Management System: Integrating Artificial ..., https://www.researchgate.net/publication/389363577_AI_Based_Traffic_Management_System_Integrating_Artificial_Intelligence_for_Sustainable_Urban_Traffic_Solutions 5. Traffic Light Control in Vehicular Network Systems using Fuzzy Logic, https://ej-compute.org/index.php/compute/article/view/132 6. Efficient Intersection Management Based on an Adaptive Fuzzy-Logic Traffic Signal, https://elib.dlr.de/187141/1/applsci-12-06024.pdf 7. YOLOv8 Object Tracking and Counting - Learn OpenCV, https://learnopencv.com/yolov8-object-tracking-and-counting-with-opencv/ 8. Jetson Nano vs Raspberry Pi AI: The Ultimate Performance Comparison fo - ThinkRobotics.com, https://thinkrobotics.com/blogs/learn/jetson-nano-vs-raspberry-pi-ai-the-ultimate-performance-comparison-for-edge-computing 9. Traffic automobile counter using open CV and YOLO - The Pharma Innovation, https://www.thepharmajournal.com/archives/2019/vol8issue2/PartN/13-2-103-212.pdf 10. Vehicle Counting, Classification & Detection using OpenCV & Python - TechVidvan, https://techvidvan.com/tutorials/opencv-vehicle-detection-classification-counting/ 11. Enhancing Vision-Based Vehicle Detection and Counting Systems with the Darknet Algorithm and CNN Model - ResearchGate, https://www.researchgate.net/publication/389608796_Enhancing_Vision-Based_Vehicle_Detection_and_Counting_Systems_with_the_Darknet_Algorithm_and_CNN_Model 12. hank-ai/darknet: Darknet/YOLO object detection framework - GitHub, https://github.com/hank-ai/darknet 13. Automated Vehicle Counting from Pre-Recorded Video Using You Only Look Once (YOLO) Object Detection Model - MDPI, https://www.mdpi.com/2313-433X/9/7/131 14. Yolo Darknet Detecting Only Specific Class like Person, Cat, Dog etc - Stack Overflow, https://stackoverflow.com/questions/44674517/yolo-darknet-detecting-only-specific-class-like-person-cat-dog-etc 15. leggedrobotics/darknet_ros: YOLO ROS: Real-Time Object Detection for ROS - GitHub, https://github.com/leggedrobotics/darknet_ros 16. TRAFFIC AND TRANSPORTATION 1.1 Present Scenario 1.2 Traffic ..., https://www.kochimetro.org/wp-content/uploads/2014/11/Traffic-Transportation-study-report-for-kochi.pdf 17. Q-Net: Transferable Queue Length Estimation via Kalman-based Neural Networks, https://chatpaper.com/paper/193009 18. Road Traffic Signal Design By Using Webster Method - IJSEAS, https://ijseas.com/volume8/v8i2/IJSEAS202202102.pdf 19. Traffic Light Timing Optimization using Webster's Formula: Graphical Representation, https://ijsret.com/wp-content/uploads/IJSRET_V11_issue3_1074.pdf 20. Traffic Signal Design | Webster's Formula for Optimum Cycle Length - APSEd, https://www.apsed.in/post/traffic-signal-design-webster-s-formula-for-optimum-cycle-length 21. Calculation of Traffic Signal Timings-Webster's Method Note13 | PDF - Scribd, https://www.scribd.com/document/426459256/Calculation-of-Traffic-Signal-Timings-Webster-s-Method-Note13 22. SIGNAL DESIGN FOR T-INTERSECTION BY USING WEBSTER'S METHOD IN NANDYAL TOWN, KURNOOL DISTRICT OF ANDHRA PRADESH - IRJET, https://www.irjet.net/archives/V3/i4/IRJET-V3I4224.pdf 23. An Adaptive Method for Traffic Signal Control Based on Fuzzy Logic With Webster and Modified Webster Formula Using SUMO Traffic Simulator, https://earsiv.kmu.edu.tr/server/api/core/bitstreams/26e1e4c5-db5a-4579-a382-8d9bab71536b/content 24. Real-Time Turning Movement, Queue Length, and Traffic Density Estimation and Prediction Using Vehicle Trajectory and Stationary Sensor Data - MDPI, https://www.mdpi.com/1424-8220/25/3/830 25. Embedded Systems Developer Kits & Modules from NVIDIA Jetson, https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/ 26. Jetson Nano vs Raspberry Pi: Which Is Better for AI Projects - twowin technology, https://twowintech.com/jetson-nano-vs-raspberry-pi-which-is-better-for-ai-projects/ 27. GPIO Access in C with Raspberry Pi: Traffic Lights | simonprickett.dev, https://simonprickett.dev/gpio-access-in-c-with-raspberry-pi-traffic-lights/ 28. NVIDIA/jetson-gpio: A Python library that enables the use of Jetson's GPIOs - GitHub, https://github.com/NVIDIA/jetson-gpio 29. Jetson Nano GPIO control in C/C++ : r/JetsonNano - Reddit, https://www.reddit.com/r/JetsonNano/comments/wzycm3/jetson_nano_gpio_control_in_cc/ 30. Where to install libgpiod to work with GPIO? - Jetson Nano - NVIDIA Developer Forums, https://forums.developer.nvidia.com/t/where-to-install-libgpiod-to-work-with-gpio/157174 31. Darknet/YOLO API - Darknet/YOLO, https://darknetcv.ai/api/api.html 32. darknet.h File Reference, https://darknetcv.ai/api/darknet_8h.html 33. Car Detection using OpenCV and Python within 5 minutes! - Folio3 AI, https://www.folio3.ai/blog/car-detection-using-opencv-and-python-within-5-minutes/ 34. GPIO Programming: Exploring the libgpiod Library | ICS - Integrated Computer Solutions, https://www.ics.com/blog/gpio-programming-exploring-libgpiod-library 35. libgpiod-example/libgpiod-led/main.c at master · starnight/libgpiod-example - GitHub, https://github.com/starnight/libgpiod-example/blob/master/libgpiod-led/main.c 36. Control GPIO using libgpiod API - NXP Community, https://community.nxp.com/t5/i-MX-Processors/Control-GPIO-using-libgpiod-API/td-p/1988460 37. SMART City Mission - LSGD Kerala | തദ്ദേശ സ്വയംഭരണ വകുപ്പ്, https://lsgd.kerala.gov.in/en/about-the-department/aligned-institutions/smart-city-mission/ 38. Kochi's Intelligent Traffic Management System (ITMS) equipped with Delta Display Solutions, https://www.deltaelectronicsindia.com/en-IN/about/storyDetail/kochi-intelligent-traffic-management-system 39. GOVERNMENT OF INDIA MINISTRY OF HOUSING AND URBAN ..., https://sansad.in/getFile/loksabhaquestions/annex/1711/AU1239.pdf?source=pqals 40. AI Surveillance Cameras: A New Chapter in Kerala's Road Safety and Traffic Laws, https://petrotechsafety.com/ai-surveillance-cameras-a-new-chapter-in-keralas-road-safety-and-traffic-laws/ 41. Advancing Traffic Management: Exploring AI Camera Systems in Kerala - ijrpr, https://ijrpr.com/uploads/V5ISSUE3/IJRPR23673.pdf 42. TRAFFIC MANAGEMENT SYSTEM – CSML - Cochin Smart Mission Limited, https://csml.co.in/traffic-management-system/ 43. traci - PyPI, https://pypi.org/project/traci/ 44. TraCI - SUMO Documentation, https://sumo.dlr.de/docs/TraCI.html 45. sumo/docs/web/docs/TraCI.md at main - GitHub, https://github.com/eclipse/sumo/blob/main/docs/web/docs/TraCI.md 46. Mastering SUMO Traffic Simulation with TraCI | by Taher Almoussali - Medium, https://medium.com/@taheralmoussali/using-traci-library-b22d0dd4aaac 47. C++ TraCIAPI client library - Eclipse SUMO - Simulation of Urban MObility, https://sumo.dlr.de/docs/TraCI/C%2B%2BTraCIAPI.html 48. Libtraci - SUMO Documentation - Eclipse SUMO - Simulation of Urban MObility, https://sumo.dlr.de/docs/Libtraci.html 49. Design and Development of Portable Fuzzy Logic based Traffic Optimizer, https://msclab.wordpress.com/wp-content/uploads/2011/01/design-and-development-of-portable-fuzzy-logic-based-traffic-optimizer.pdf
Built With
- iot


Log in or sign up for Devpost to join the conversation.