-
-
Dahsboard
-
DropIn
-
Chat
-
Summary
Agrovity: Deterministic Safety Intelligence for Field Autonomy
Real-time hazard interpretation and explainable steering support for agricultural vehicles using deterministic reasoning.
Inspiration
Agricultural autonomy fails hardest when perception is uncertain and reaction is late.
Most systems rely on black-box models that are difficult to debug, trust, or deploy safely in real-world environments. We wanted to build a system that not only detects hazards, but explains risk and suggests safe actions in a transparent way.
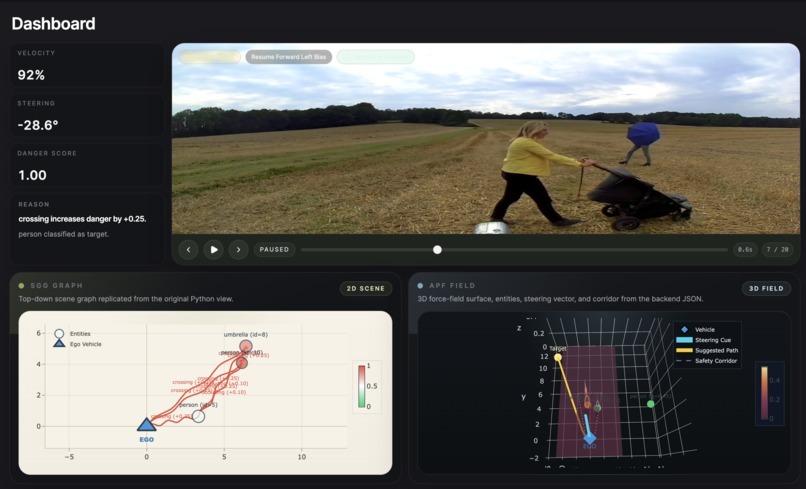
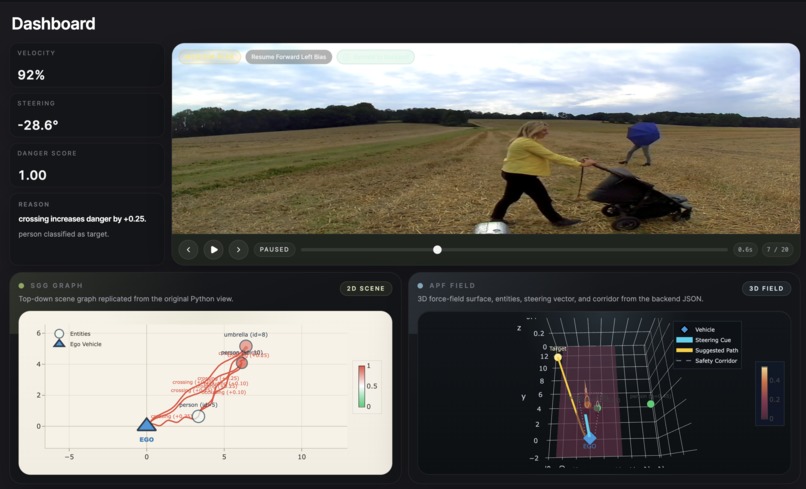
What it does
Agrovity processes short sequences of field images and outputs:
- hazard detection and tracking
- time-to-collision (TTC) estimation
- risk scoring with certainty modeling
- steering suggestions (Δθ)
- target velocity recommendations
- visual reasoning (scene + potential fields)
All outputs are frame-by-frame explainable, allowing users to inspect both reasoning and control decisions.
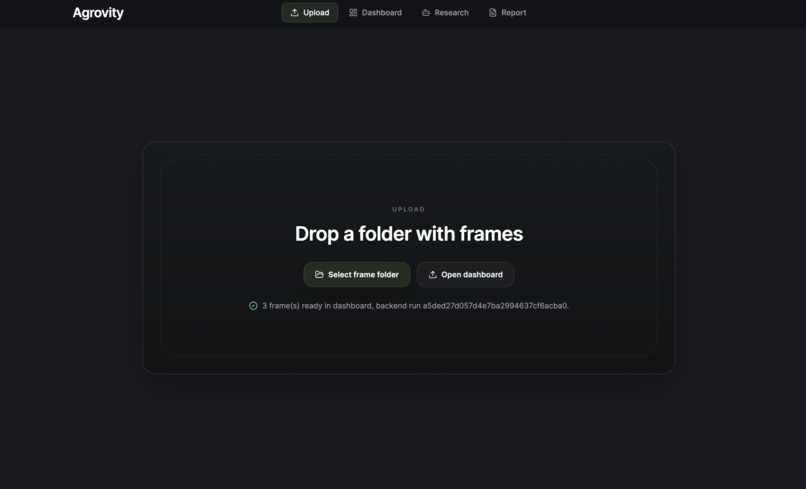
How we built it
AgroVity is a hybrid system combining learned perception with deterministic logic:
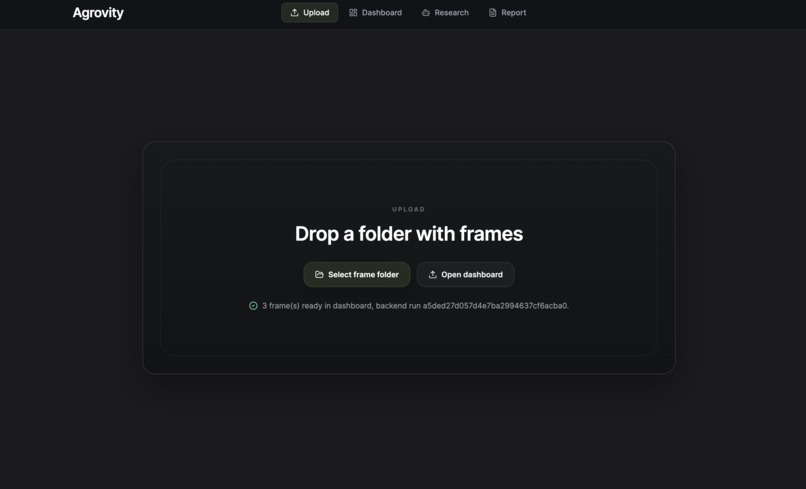
- Frames are uploaded via a web dashboard
- YOLO + ReID tracking extracts object trajectories
- Tracking data is mapped into kinematic entities
- Deterministic logic computes:
- certainty
- TTC
- danger scoring
- An Artificial Potential Field (APF) generates:
- steering direction
- target velocity
- safe navigation corridor
- steering direction
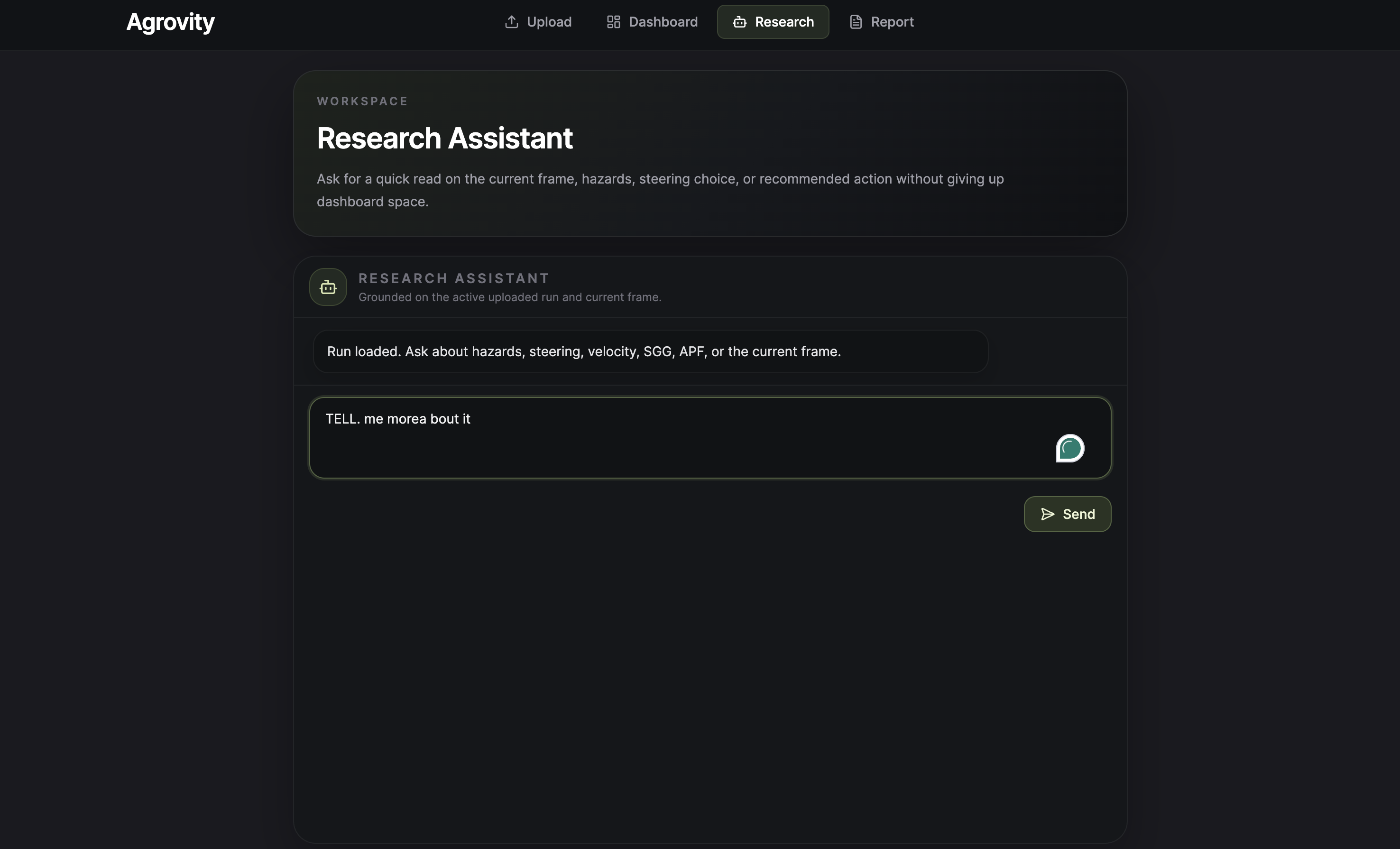
- Results are visualized in an interactive dashboard
Core Logic (Simplified)
Time-to-Collision (TTC)
$$TTC_i = d_i / max(ε, v_closing) $$
If the object is moving away:
$$TTC_i → ∞ when v_closing ≤ 0 $$
Danger Score
$$q_i = (W_class / W_max) * exp(-k * TTC_i)$$
Control (APF)
- Steering is influenced by attractive crop guidance + repulsive obstacles
- Velocity is reduced based on risk inside a forward safety corridor
- Potential field is visualized as:
z_surface = log(1 + U)
Challenges we ran into
- Heavy ML dependencies (YOLO, PyTorch, OpenCV)
- Limited frame window (short sequences only)
- Designing deterministic safety logic that generalizes
- Balancing interpretability with useful control outputs
- Building a clean pipeline from perception → reasoning → control
Accomplishments that we're proud of
- Built a full end-to-end system in a hackathon timeframe
- Created a transparent alternative to black-box autonomy
- Combined perception, physics, and control in one pipeline
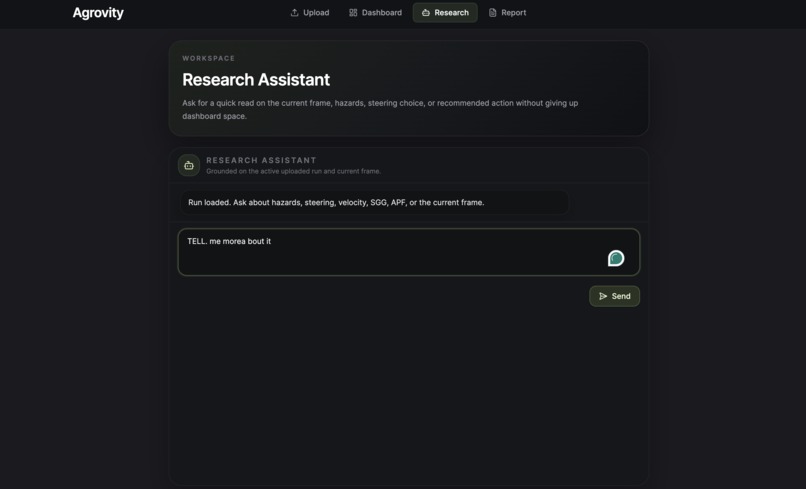
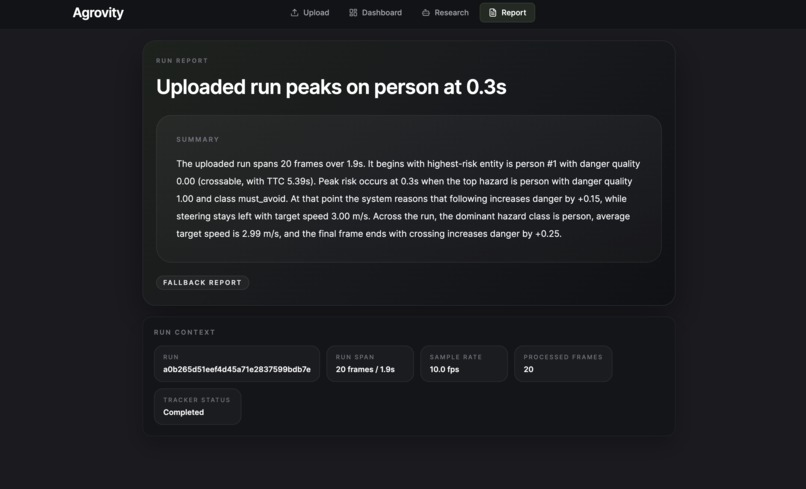
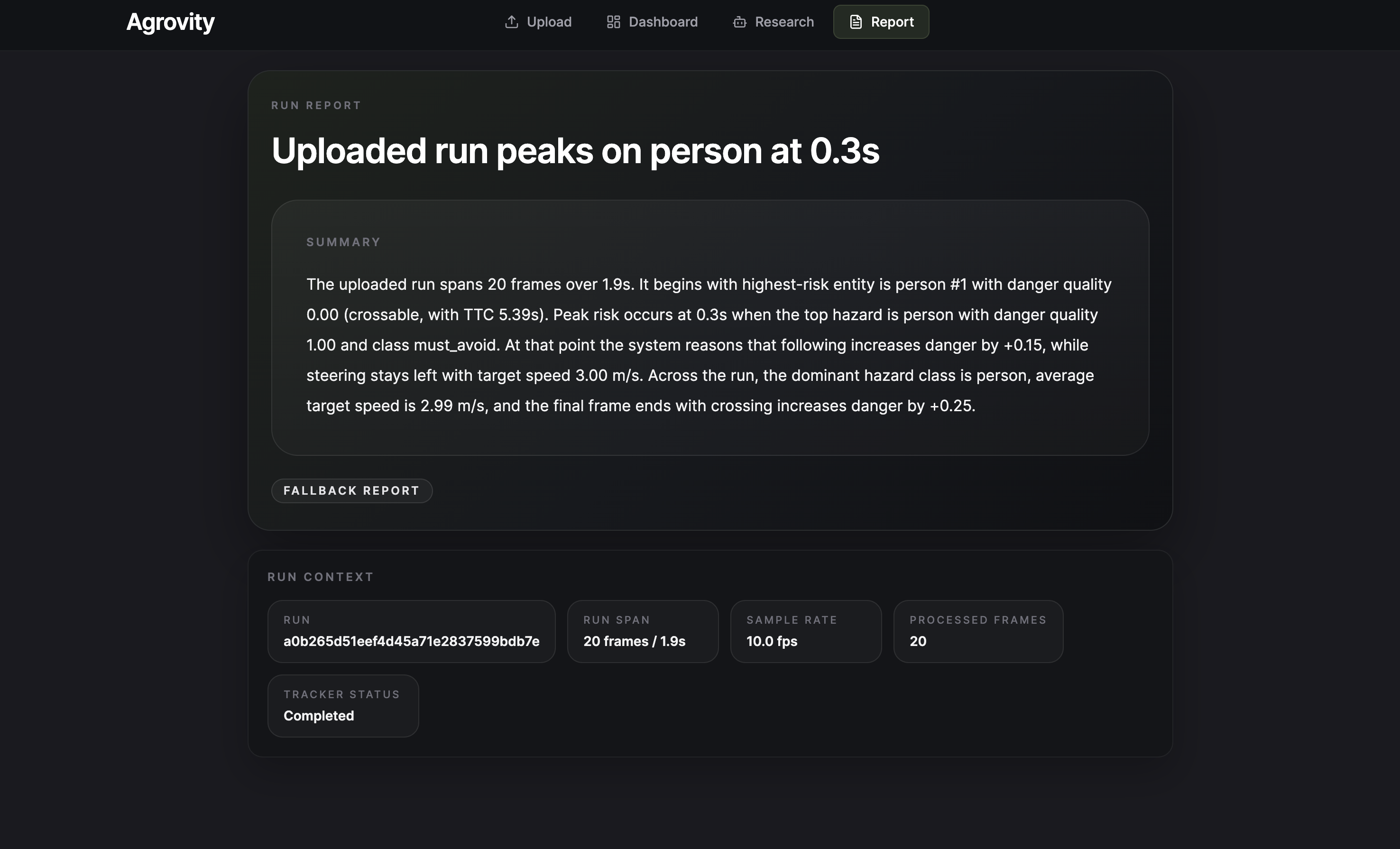
- Delivered explainable outputs, not just predictions
- Built an interactive dashboard for inspecting decisions
What we learned
- Interpretability is critical in safety systems
- Deterministic logic is powerful when combined with learned perception
- Visualizing decisions dramatically improves usability and trust
- Simplicity + clarity often outperform complex black-box approaches
What's next for AgroVity
- Real-time streaming instead of batch uploads
- Testing across diverse field conditions
- Edge deployment optimization
- Integration with real agricultural vehicles
- Hybrid learning + deterministic safety fusion
Built With
React, TypeScript, FastAPI, PyTorch, Ultralytics YOLO, OpenCV, NumPy, SciPy, Shapely

Log in or sign up for Devpost to join the conversation.