AGROVISION
Inspiration
This project was inspired by a recently published research paper in the field of Machine Learning and its applications in spacecraft technology. [link]https://nebula.esa.int/sites/default/files/neb_study/2678/C4000137512ExS.pdf
A close friend of ours, in collaboration with Mission Control Space Services Inc., conducted an innovative study comparing two implementations of the OPS-SAT SmartCam model. One approach utilized a low-level Field Programmable Gate Array (FPGA) while the other employed a high-level CPU model using TensorFlow Lite. The purpose of this comparison was to explore the feasibility and performance differences between these two technologies in the context of spacecraft.
Study Findings
The research revealed that the FPGA implementation successfully matched the precision and accuracy of the high-level CPU model. Despite this success, the FPGA operated at a slower computation speed. This finding suggests that while the FPGA is capable of performing complex machine-learning tasks with high accuracy, there is room for improvement in its processing speed. The study concluded that with further optimization, the FPGA implementation could potentially close the performance gap and pave the way for new methods of deploying deep learning on spacecraft.
Motivation Factor for Our Project
Inspired by the insights and findings from this research, we were motivated to experiment with our own FPGA. Our goal is to implement a machine learning model on the FPGA to address some of the world's most pressing challenges. We believe that by leveraging the unique capabilities of FPGAs, such as their reconfigurability and parallel processing power, we can develop innovative solutions that can be applied to some of today's most pressing problems, including agriculture, healthcare, or environmental monitoring.
What it does
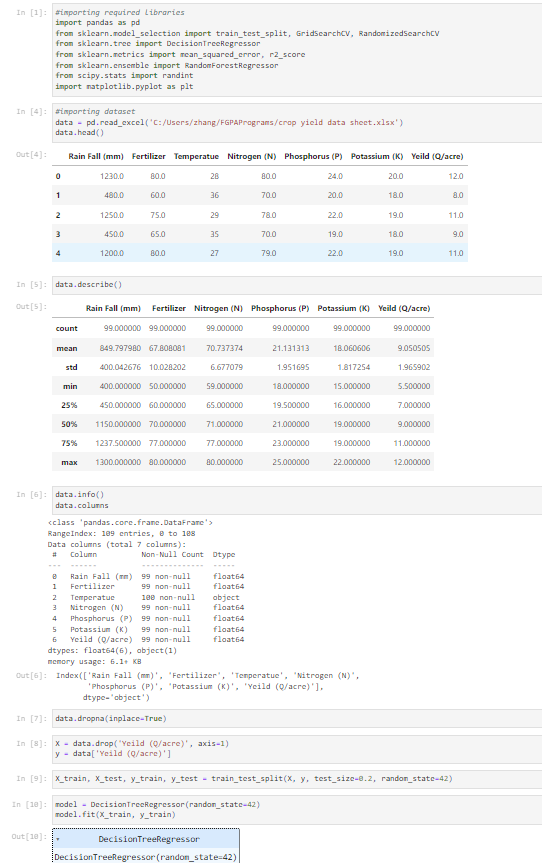
AgroVision is an FPGA prototype that implements a KNN that returns the potential crop yield prediction based on humidity and temperature inputs given by a DHT11 module. This device takes in XXX data from the sensor via XXX, and processes the data through our machine-learning algorithm, which predicts how well XXX will thrive according to these conditions.
How we built it
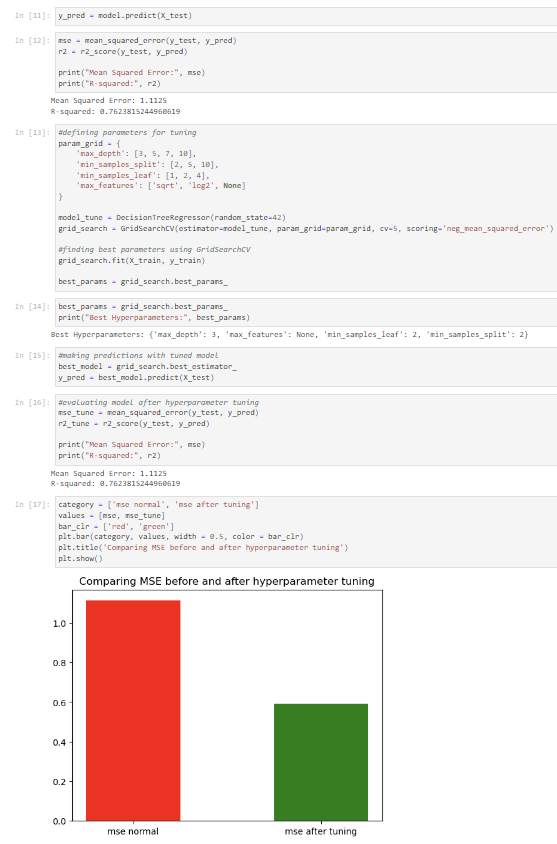
We built a DHT11 controller in Verilog, then we implemented a decision tree on our FPGA, and every cycle, pulled the temperature and humidity data from our DHT11 sensor, and entered this input into the design tree to return a crop yield.
Challenges we ran into
We initially tried to integrate a Nexigo N930AF webcam, but we could not analyze the digital USB output as it is on the HPS side of the De1-SoC. We could not figure out how to allow the HPS and the FPGA sides to communicate. The camera could not be connected to the FPGA as the camera did not support RCA communication. We then migrated our idea to utilize a DHT11 temperature/humidity sensor as they were configurable with the FPGA side of the De1-SoC. In the end, we could not complete this project due to time constraints and technical issues.
Accomplishments that we're proud of
We are proud of successfully implementing a machine learning model on an FPGA, which demonstrates the potential of this technology for practical applications. Additionally, we developed a DHT11 controller in Verilog, showcasing our ability to work with hardware description languages. Achieving accurate crop yield predictions based on environmental data is another significant accomplishment.
What we learned
Throughout this project, we gained a deep understanding of the intricacies of FPGA programming and the challenges associated with integrating peripherals. We learned the importance of sensor compatibility and the need for efficient data communication between different system components. Furthermore, we explored practical applications of machine learning models in hardware, which provided valuable insights into com
What's next for AgroVision
Moving forward, we plan to actually complete the integration of each component of our idea. Furthermore, we plan to optimize the FPGA implementation to improve processing speed and overall performance. We also aim to integrate additional sensors to collect more comprehensive environmental data, which will enhance the accuracy of our crop yield predictions. Developing a user-friendly interface for real-time monitoring and data visualization is another priority, making our system more accessible and practical for end-users. Finally, we intend to expand the scope of the project to include a wider variety of crop types and environmental variables, further increasing the versatility and applicability of AgroVision.
Built With
- asics
- fpga
- verilog


Log in or sign up for Devpost to join the conversation.