-
-
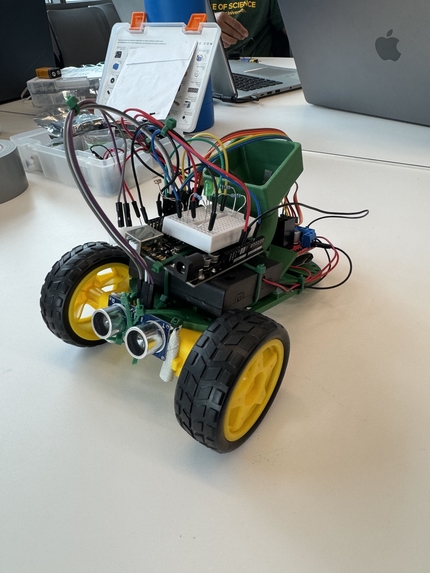
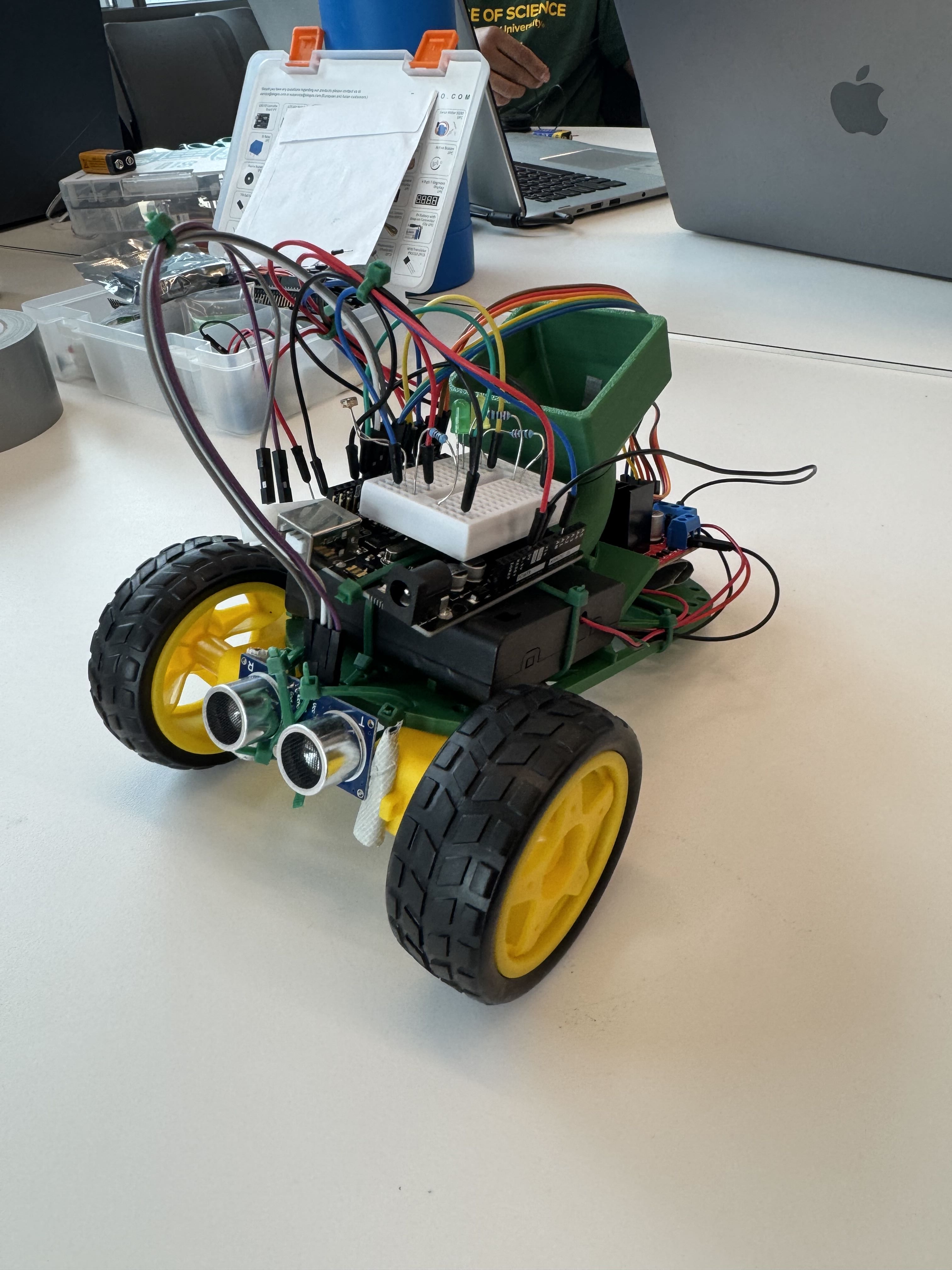
AgroBot Fully Assembled
-

ME Technologies Team Proudly Presenting AgroBot

Inspiration: We were inspired by the global deforestation crisis and wanted to create an accessible, automated solution that could contribute to reforestation without requiring human intervention.
What it does: AgroBot autonomously detects sunlit, deforested areas using a photoresistor and plants seeds while avoiding obstacles with an ultrasonic sensor. It’s a hands-free, eco-friendly robot planter.
How we built it: We used an Arduino Uno to control the system, a photoresistor for light detection, an ultrasonic sensor for navigation, and a 3D-printed chassis with a custom seed dispenser. We wrote the logic in C++ and assembled everything in under 8 hours.
Challenges we ran into: Aligning the sensor data with real-world conditions was tricky, especially differentiating between shade and sunlight in variable lighting. Designing and printing a working seed dispenser under time pressure also pushed our limits.
Accomplishments that we're proud of: We built a fully autonomous, functioning prototype in just 8 hours. We’re proud of our teamwork, creative problem-solving, and how effectively we combined software, hardware, and mechanical design.
What we learned: We learned a ton about rapid prototyping, sensor calibration, and real-world constraints in robotics. Working under a tight deadline also taught us to prioritize features and manage scope effectively.
What's next for AgroBot: We want to enhance AgroBot’s intelligence with GPS integration and AI-based terrain analysis. Eventually, we envision swarms of AgroBots working together to reforest large areas efficiently.


Log in or sign up for Devpost to join the conversation.