
Inspiration
From a very long time I was thinking of making a selfbalancing bot and in this hackathon I tried to make one.
What it does
This bot can balance itself, no matter how the surface is and what the surface is
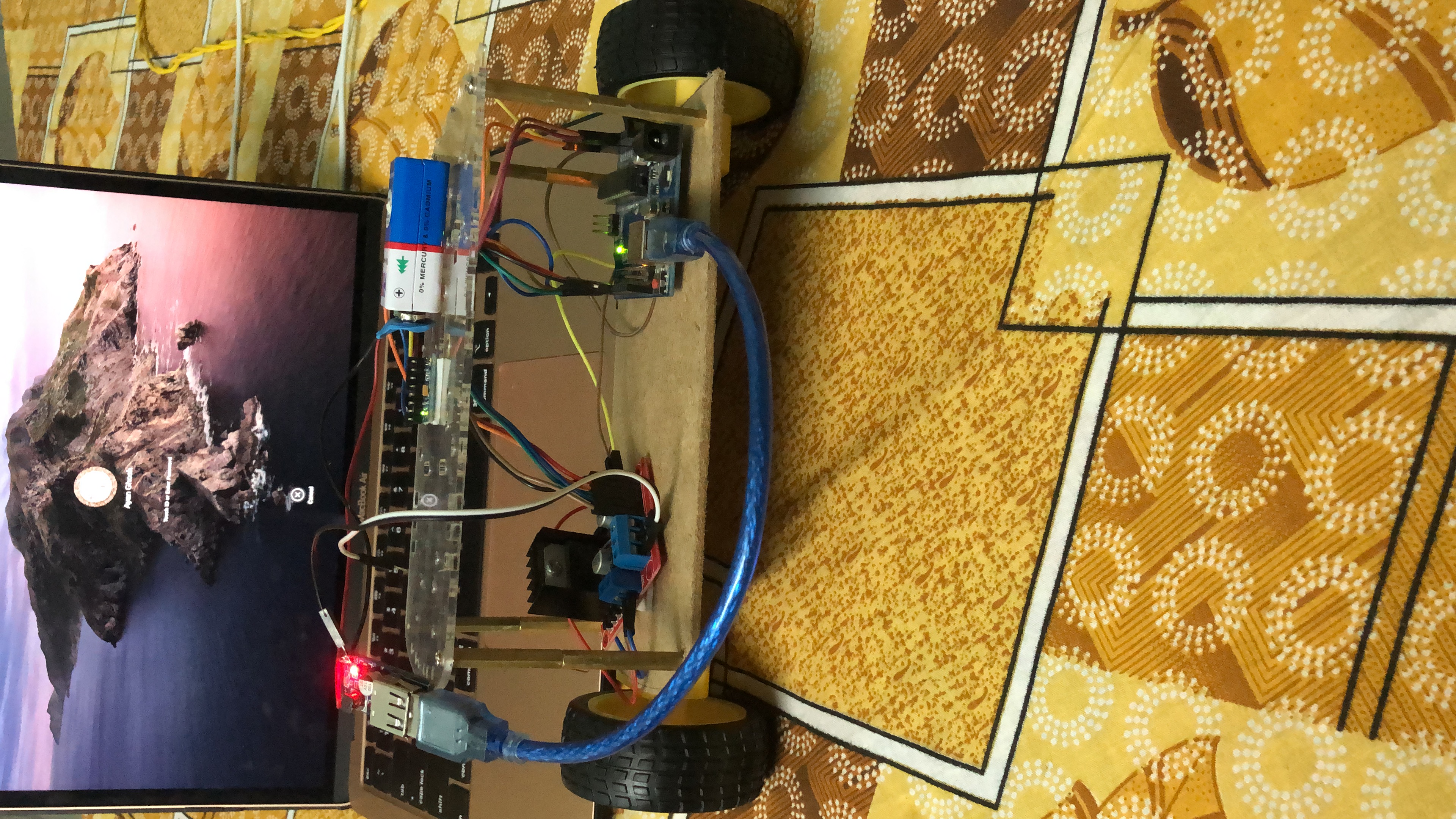
How we built it
I had built it using the motor driver, Arduino and two dc motors.
Challenges we ran into
The challenge I ran into was the PID tunning of the bot to make it stable.
Accomplishments that we're proud of
That I had built the bot in this limited amount of time and the bot can balance itself well without any jittering effect.
Built With
- arduino
- dc-motor
- l298-motor-driver

Log in or sign up for Devpost to join the conversation.