
Inspiration
Every year, billions of pounds of trash enter the ocean and wash up on beaches, leading to devastating problems in human and animal health. We have decided to combat this problem using our robot AEGIS-V, which collects plastic waste that washes up on the beach.
What it does
The robot sends a live feed to the website that displays what it's seeing. It stores locations in MongoDB, has a counter to track how much trash it has detected and picked up, and displays locations of where the trash appeared.
How we built it
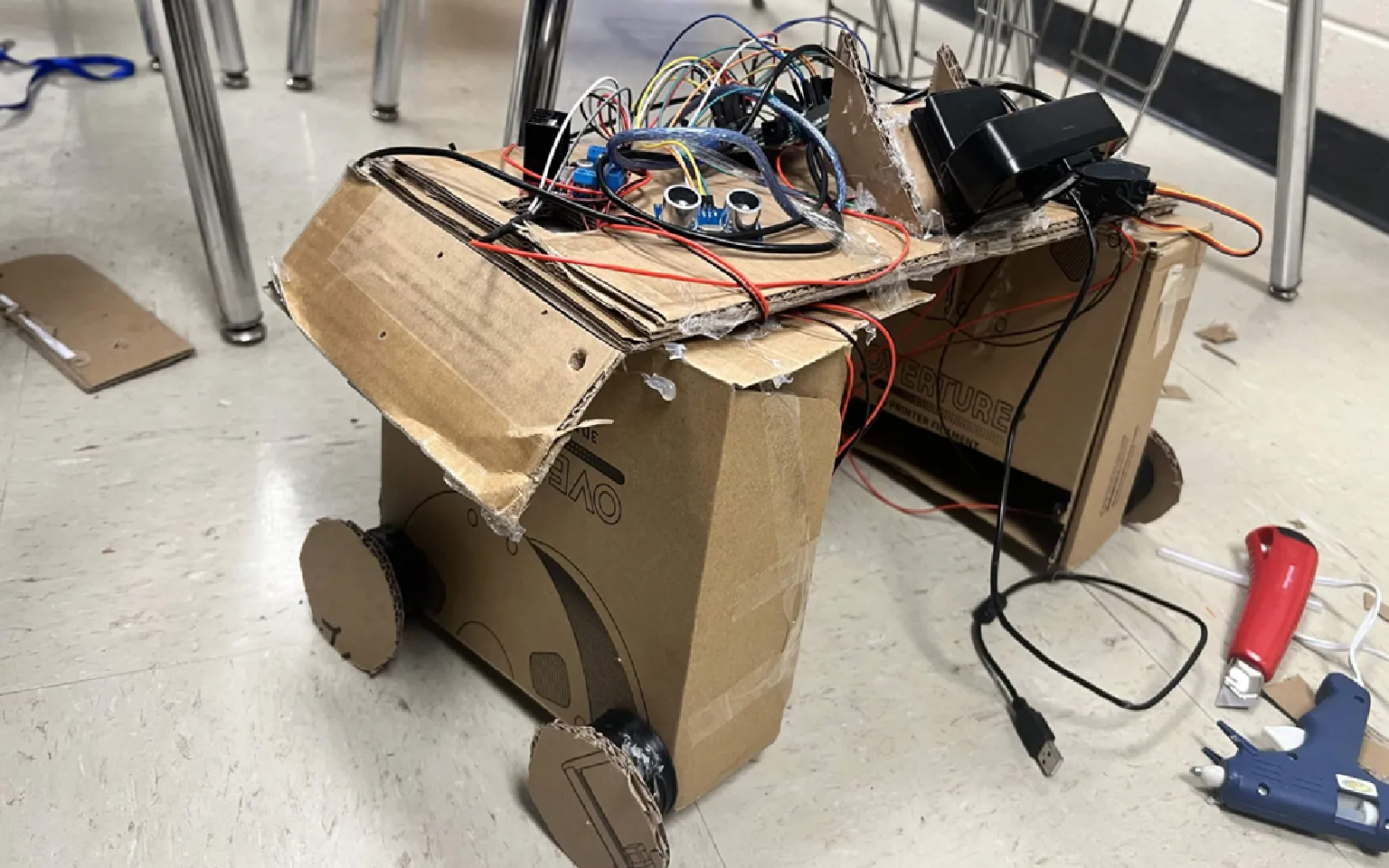
We used recycled materials such as cardboard for our robot body to maintain an environmentally-friendly approach. The robot wheels were 3D-printed.
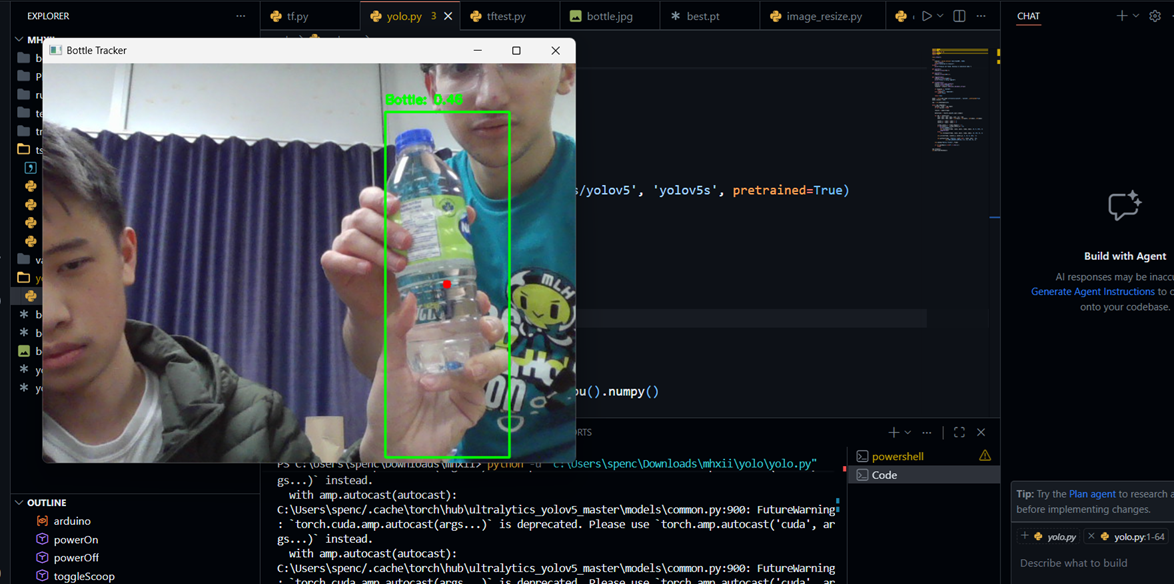
Approximately 200 images of plastic waste were used in the machine learning training process to help our robot detect which objects are waste and which are not.
We used an Arduino UNO module with Arduino-C++, render to host our flask server, MongoDB for our database, Raspberry Pi to connect the Arduino and the server to control our robot, a webcam, and ultrasonic sensors for computer vision and autonomous driving.
Challenges we ran into
Our 3D-printer failed 5 times, leading to countless hours of time lost. However, we were flexible and used cardboard for our materials instead.
Our robot smoked a few times due to wiring issues. Necessary equipment was left at home.
Accomplishments that we're proud of
Despite the unfortunate series of events that we encountered, we pushed forward by thinking of innovative solutions, like the cardboard, or finding alternative materials when we left things at home to ensure that we can complete the project on time.
We're proud to build a robot to solve the rapidly arising and alarming problem of ocean plastics on the beaches.
What we learned
Bring backup components for building in case of failure. Take time to plan before diving into our project; it would have helped us see more clearly what we have done and what we still need to accomplish.
What's next for AEGIS-V
We plan to have our robot around the world; thus, we look to implement a GPS module to return real-life co-ordinates. These coordinates will be displayed on our existing map in the user interface.
We also plan to use larger datasets for greater accuracy, so that more plastics can be detected and removed from beaches.
Finally, we hope to switch to more durable materials for our robot, as cardboard would is not ideal under certain weather conditions.
Built With
- arduino
- autonomous
- c++
- computer-vision
- css
- flask
- html5
- javascript
- mongodb
- pyserial
- python
- raspberry-pi
- render
- sensors
- torch
- ultrasonic
- webcam
- yolo


Log in or sign up for Devpost to join the conversation.