-
-
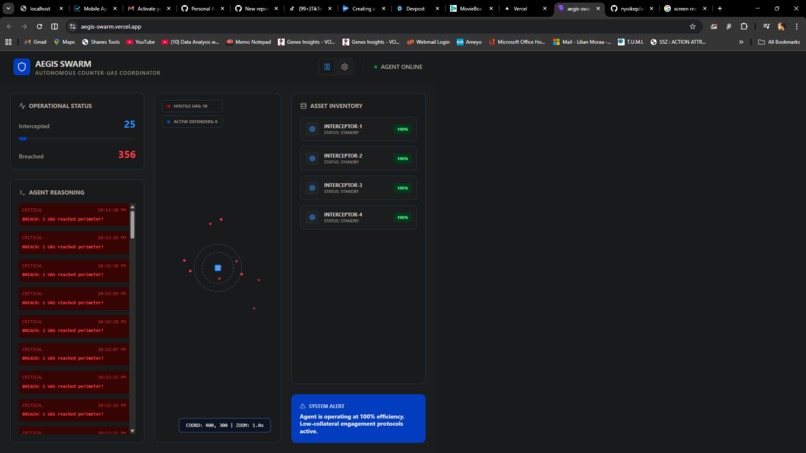
Aegis-Swarm
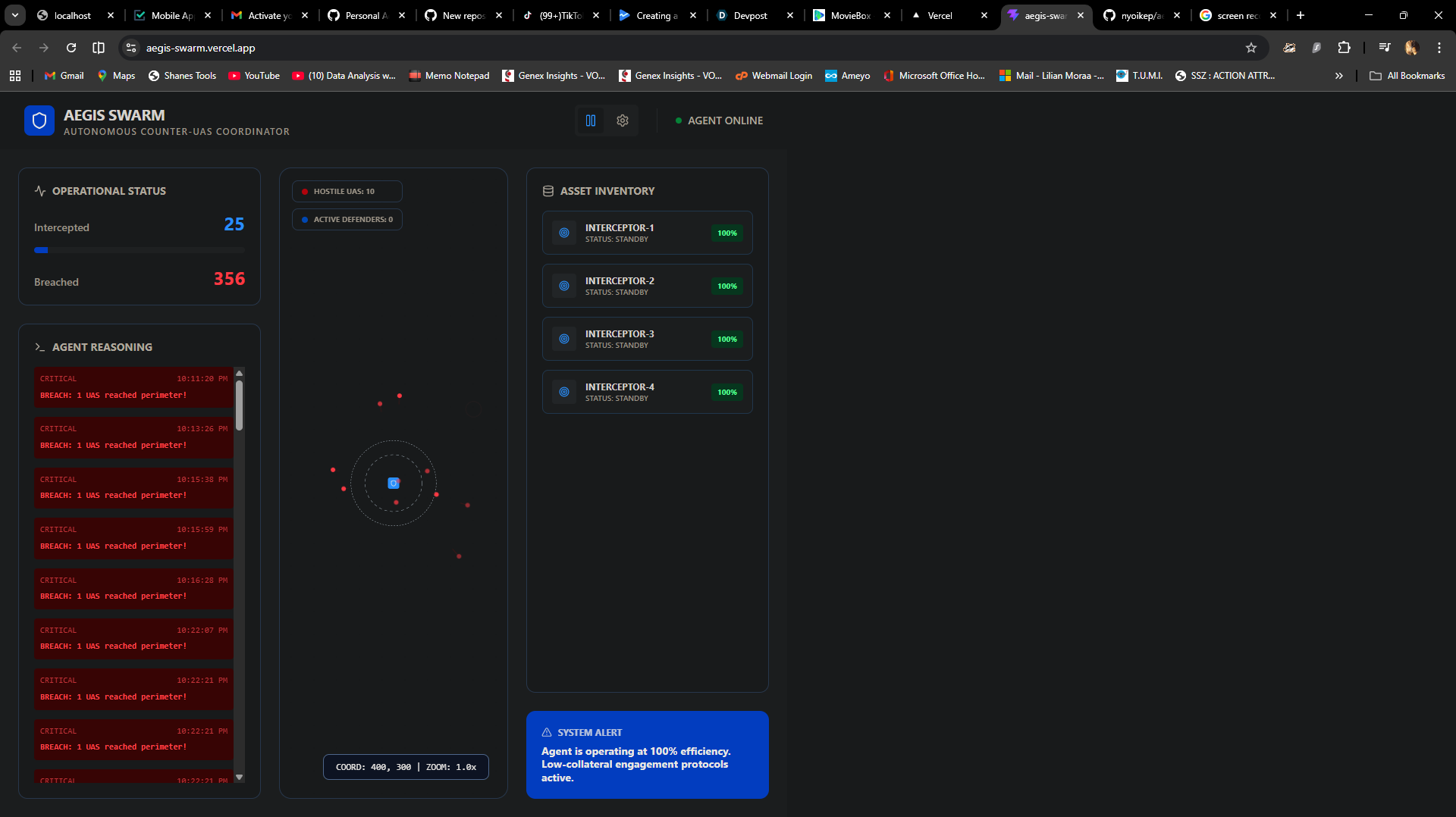
In modern warfare, the "quantity" of low-cost drone swarms has become a primary tactical challenge. We were inspired by the concept of the "Contested OODA Loop"—the idea that human operators cannot process multi-directional swarm data fast enough. We built Aegis Swarm to prove that an AI agent can act as a force multiplier by handling the "Decide" and "Act" phases of defense autonomously.
How we built it: The project is built on a high-performance React core using a custom useSimulation hook for physics-based telemetry. We implemented a Priority-Based Assignment Agent that evaluates threats in real-time. The UI was designed with a "Clean Enterprise" aesthetic using Tailwind CSS to ensure that critical data remains readable under high-stress "swarm" scenarios.
What we learned: We discovered that the hardest part of autonomous defense isn't the intercept; it's the prioritization logic. We had to refine how the agent weights speed vs. distance to prevent "target fixation" on slow, close drones while high-velocity threats were still outside the perimeter.
Challenges faced: The primary challenge was synchronizing the state between the AI agent's decision-making loop and the 60fps physics engine. We solved this using a decoupled "Intelligence Feed" that logs the agent's reasoning without interrupting the visual simulation.
The Technical Logic The agent calculates the Lethality Score ($L$) for every detected UAS ($u$) using the following formula:
$$L_u = \frac{V_u \cdot P_u}{\sqrt{(x_u - x_a)^2 + (y_u - y_a)^2}}$$
Where:
- $V_u$ = Velocity of the UAS
- $P_u$ = Priority constant based on UAS variant
- $(x_a, y_a)$ = Coordinates of the High-Value Asset


Log in or sign up for Devpost to join the conversation.