Inspiration
Our team is from cities like Baltimore, New Haven, and London, so we’re no strangers to crime-filled communities. We think parents shouldn’t have to fear letting their kids walk five blocks home from school, women shouldn’t have to fear their route home after work, and residents shouldn’t have to fear an evening stroll in their neighborhood. But today, every corner feels like a question mark of safety. Through Aegis, we hope to shield our communities from the ever-present risk of violence by giving people peace of mind on their journeys.
What it does
Aegis is a pedestrian-centered GPS that optimizes for safety. Aegis uses real-time crime data from police stations and street-lighting information straight from satellites, so you always follow the safest path. Aegis shows you the most up-to-date crime heatmap, and when there’s danger ahead, it alerts you and reroutes in real time, ensuring that users are constantly protected on their journeys.
How we built it
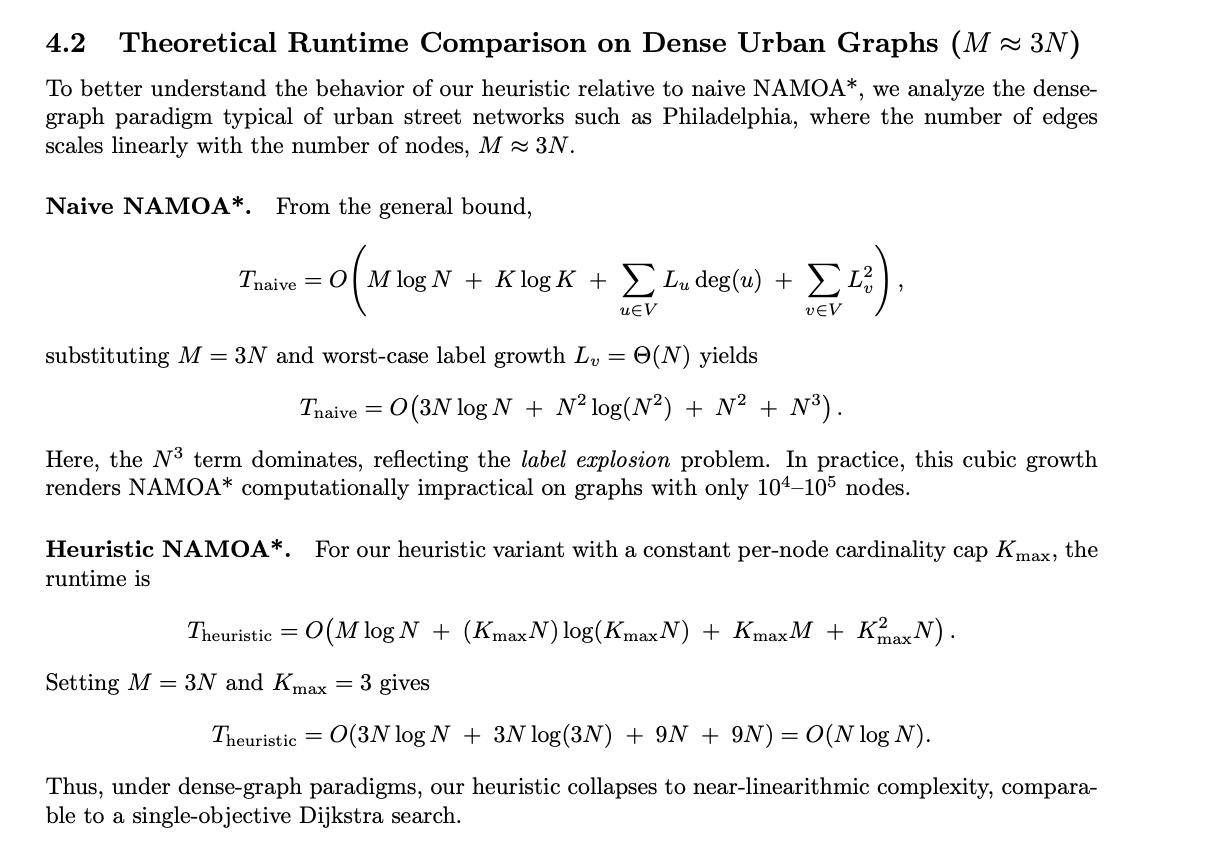
Aegis ingests real-time crime and lighting data from Philadelphia Official Crime Database and NASA VIIRS satellites to run a novel C++ path planning algorithm. Unlike existing routing systems, our approach introduces a heuristic adaptation of NAMOA (Mandow et al., 2005), a multi-objective extension of A* that efficiently computes Pareto-optimal routes while avoiding the label explosion problem that typically makes such methods impractical. Unlike traditional algorithms that optimize for only one factor, NAMOA* balances conflicting goals, such as avoiding dark streets while minimizing travel time, while guaranteeing that suggested routes are Pareto-optimal: no route can be made brighter without also becoming slower, and no route can be made shorter without becoming less safe. The result is a dynamic system that allows pedestrians to make actionable choices—fastest, brightest, and balanced—rather than a one-size-fits-all path.
Our frontend is built with React, TypeScript, and Tailwind. It continuously queries our backend to update our mapping engine, which is built on the Google Geocoding, Directions, and Maps APIs. The backend is built with Flask and communicates with the C++ algorithm through Cython.
Challenges we ran into
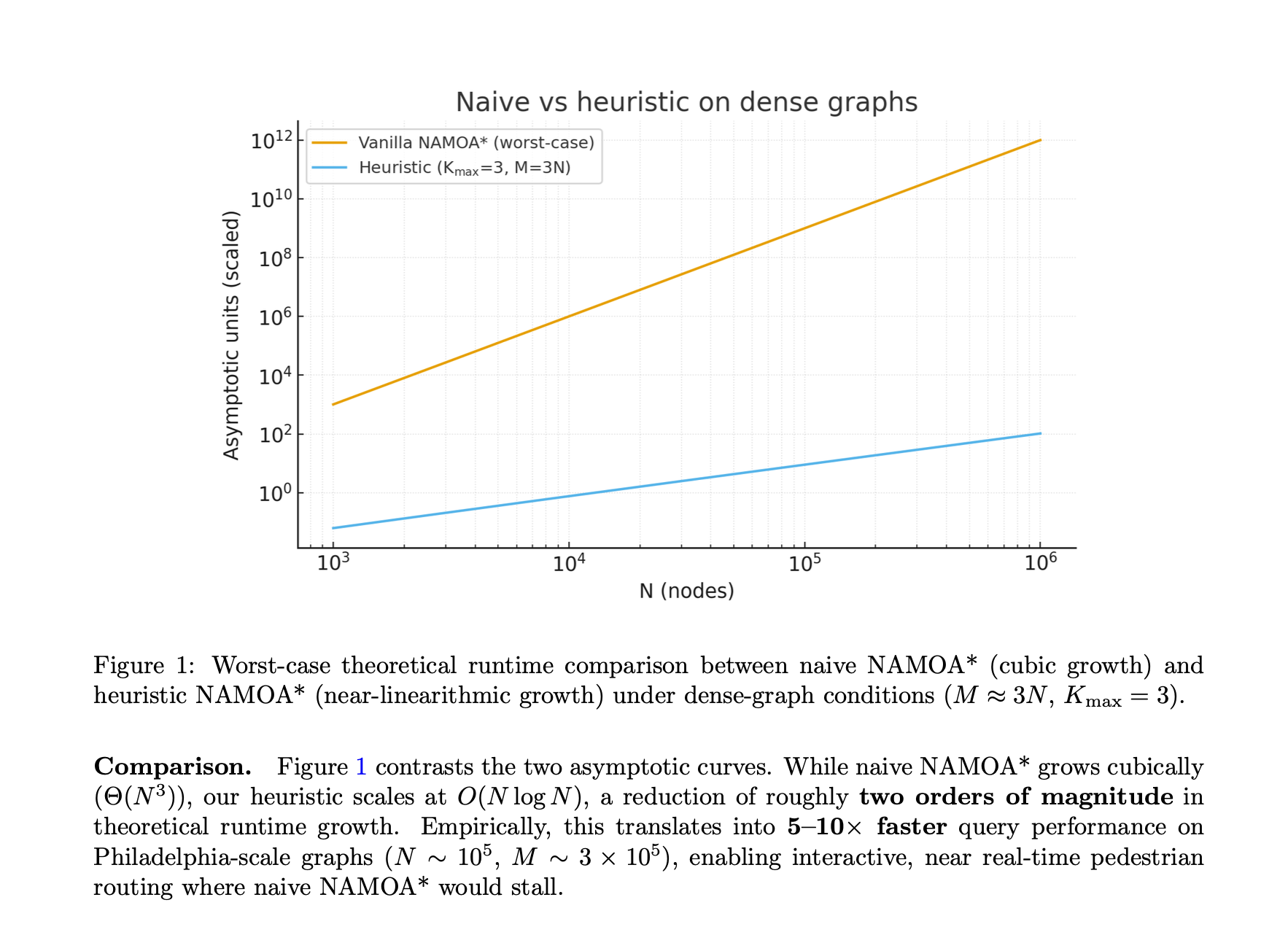
Our main challenge was optimizing the path planning algorithm to perform well on city-scale (dense) input data. Running a pure multi-objective NAMOA* search would quickly become impractical due to the exponential growth of candidate paths (the “label explosion” problem). To overcome this, we designed a set of heuristic optimizations, the most important being cardinality bounding: at each node, we restrict the number of candidate labels to a small, representative set—the fastest, brightest, and most balanced paths. This prevents “label explosion” while still storing the routes that matter most to users. We also implemented skyline-based dominance pruning and other optimally bound heuristics, ensuring that clearly inferior routes are discarded early without sacrificing safety or quality. On the front end, calling the maps API and getting controls to overlay it was a big hurdle we had to overcome as we wanted the interface to have all of the desired functionality without overwhelming users with an unnecessarily cluttered UI.
Accomplishments that we're proud of
While our original algorithm was inefficient for short paths and small volumes of nodes, using a heuristic A* algorithm, we were able to optimize our naive Dijkstra solution to perform well on complex real-world data. From there, we implemented a pruning algorithm to reduce our search space, optimizing for Pareto-efficient solutions that protect the user while giving them control over their route. We’re most proud of these continuous algorithm optimizations that eventually allowed us to process hundreds of thousands of data points within seconds.
What we learned
Through building Aegis, we deepened our understanding of efficient, complex, large-scale graph traversal algorithms. We gained insight into the variety of criteria that can be used to measure safety beyond crime and 911 calls. One of the most interesting strategies we learned about was a method of transforming raw satellite data into a consistent metric known as Spectral Radiance (Lagraa et al., 2024), which can filter moonlight, clouds, and other natural sources to derive man-made light.
What's next for Aegis
Our product currently focuses on Philadelphia, but we hope to scale the algorithm to more prominent cities across the United States. From dense urban centers like New York and Chicago to sprawling areas like Los Angeles and Houston, each city faces unique patterns of crime, and Aegis can adapt to these environments by aggregating local crime and light density data to tailor route recommendations accordingly.
Eventually, our optimistic vision is to build a nationwide safety platform that helps parents, students, residents, and visitors perform their day-to-day activities with confidence: one safe route at a time.
Built With
- c++
- cython
- docker
- flask
- react
- tailwind
- typescript




Log in or sign up for Devpost to join the conversation.