-
-
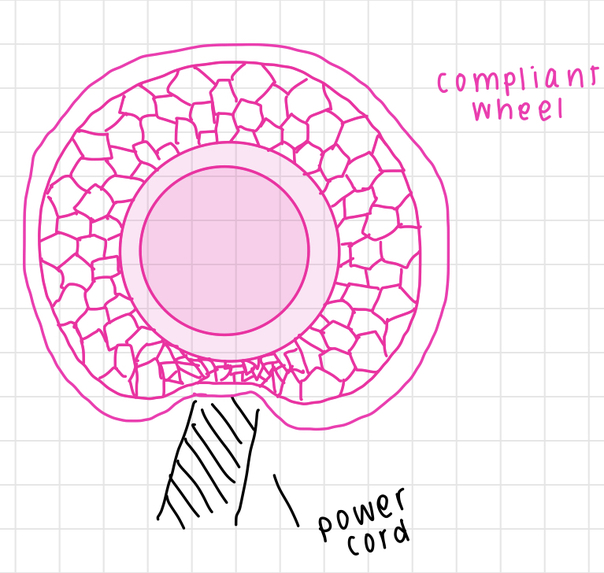
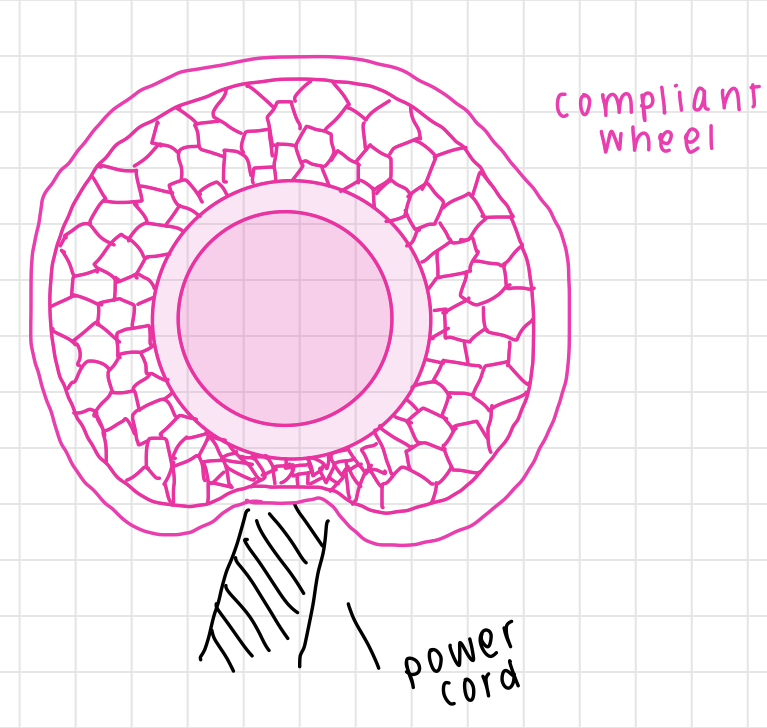
compliant wheel design
-
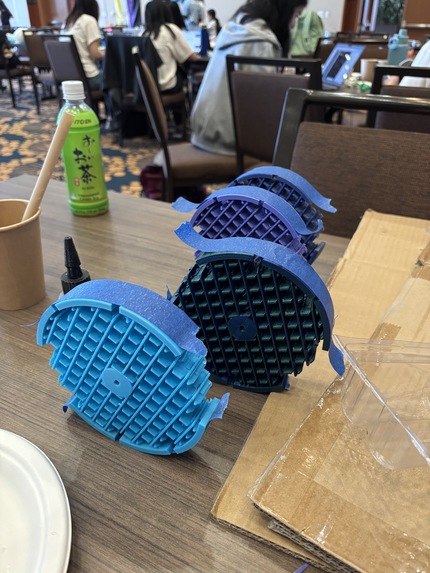
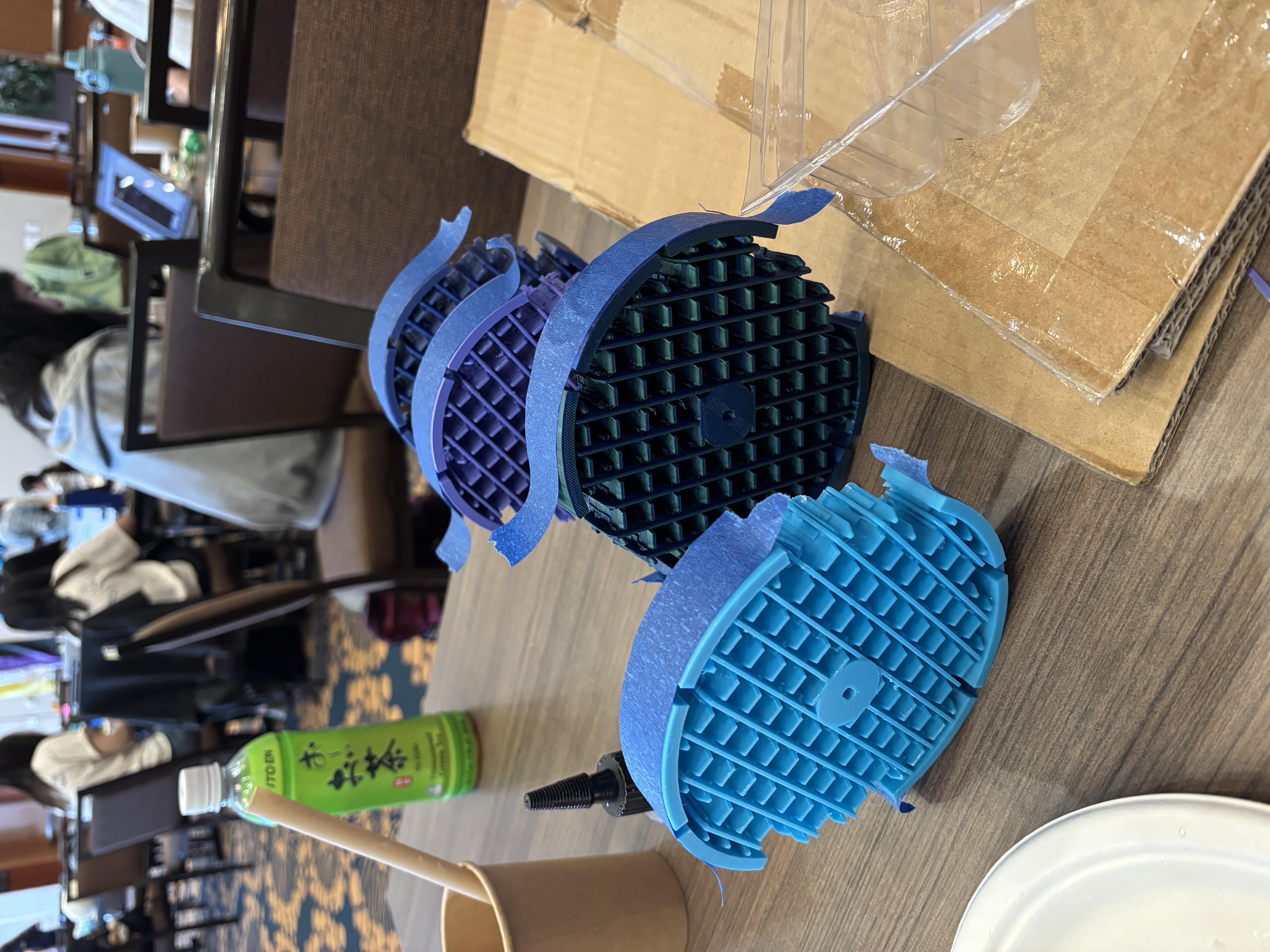
compliant wheels
-

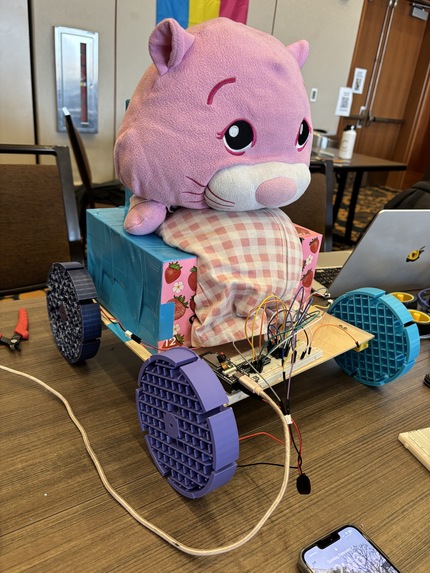
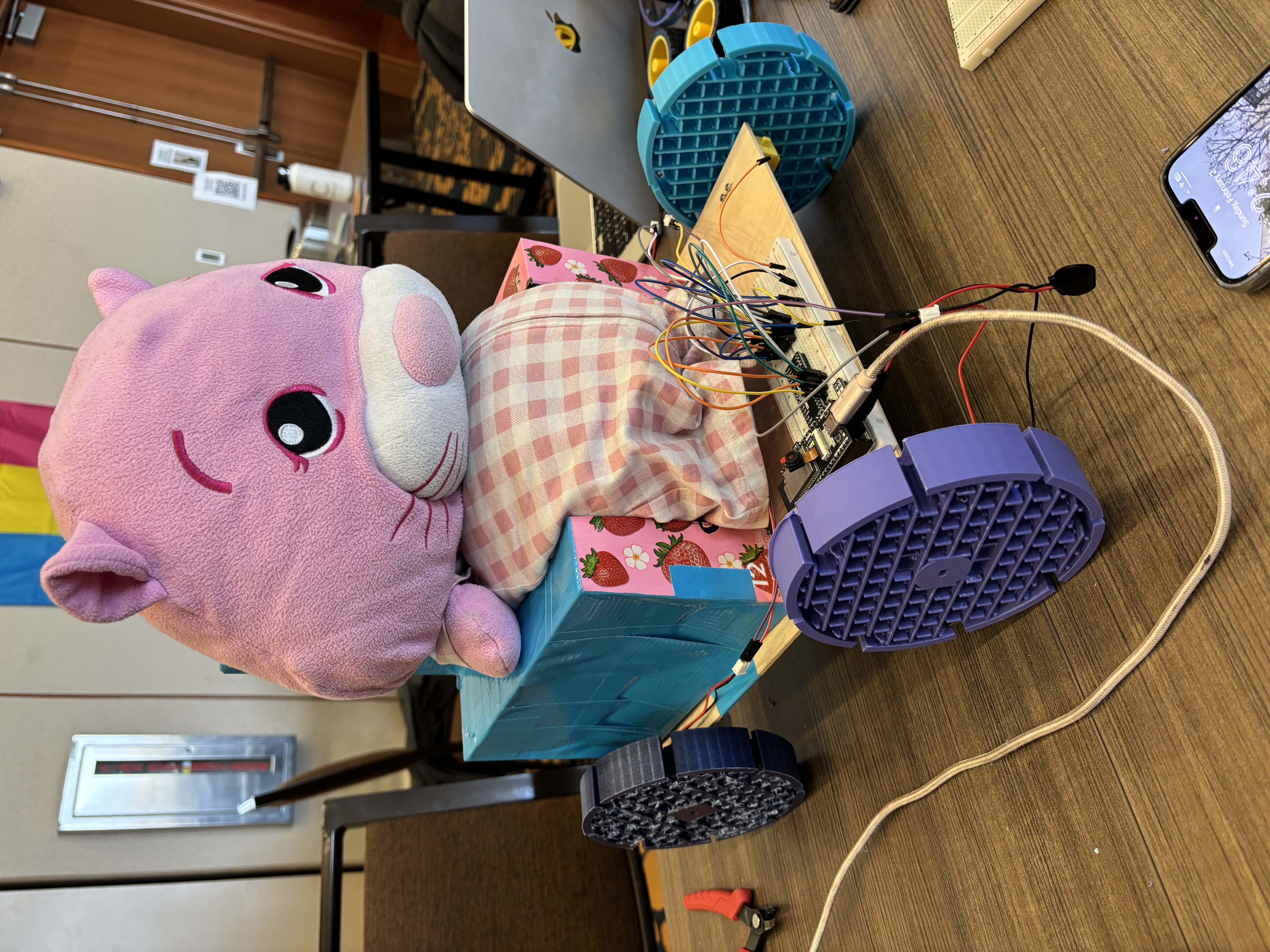
chair
-
-

Inspiration
The inspiration behind this project comes from one of the keynote speakers and our own experiences. One speakers shared her work on improving accessibility for wheelchair users, something that although we do not personally face, is something that can deserves attention in society. Throughout the hackathon our team, along with others, tripped over power cords around the room. This made us realize the additional challenges this would pose for wheelchair users.
What it does
Our hardware hack uses compliant wheels to navigate different terrains. The flexible wheels allow the chair to overcome obstacles like the power cords in the room, without causing too much instability for the user. Because the chair can be controlled from a user-friendly web app, increasing ease of use, enabling users to access controls from their phones.
How we built it
We hardwired DC motors using a breadboard and ESP 32 and designed and 3D printed press fit, compliant wheels using OnShape, Bamboo Slicer, and 3D printers. The web app is still in development, but is being coded in the Arduino IDE software.
Challenges we ran into
We had issues with the implementation of the web app, as there were hiccups with the use of our wifi module. We also had problems with the 3D printing of our wheels -- our supports had to be removed which posed challenge in the timing of the hack.
Accomplishments that we're proud of
We are especially proud of the design of the wheels, as they apply knowledge we have learned in our mechanical engineering classes to real-life applications. When the wheels run into obstacles, their flex allows for them to easily navigate over them with stability.
What we learned
We learned that teamwork and adaptability are very important in the environment of a hackathon, especially since timing is so limited. We learned to make use of the materials and resources we have to the best of our abilities to make the best hack possible!
What's next for Accessijillyity
We plan to test our design in a number of different environments to gather quantitative data of the stability and ability for our chair to maneuver over obstacles. We also plan on improving our web app, as we are still running into some problems with it. A big next step for this project would be to iterate our design for scalability.
Built With
- arduino
- onshape

Log in or sign up for Devpost to join the conversation.