-
-
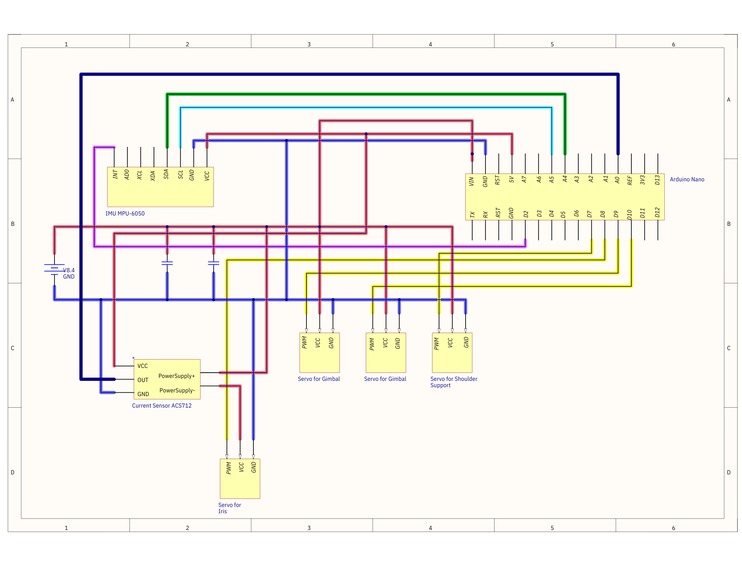
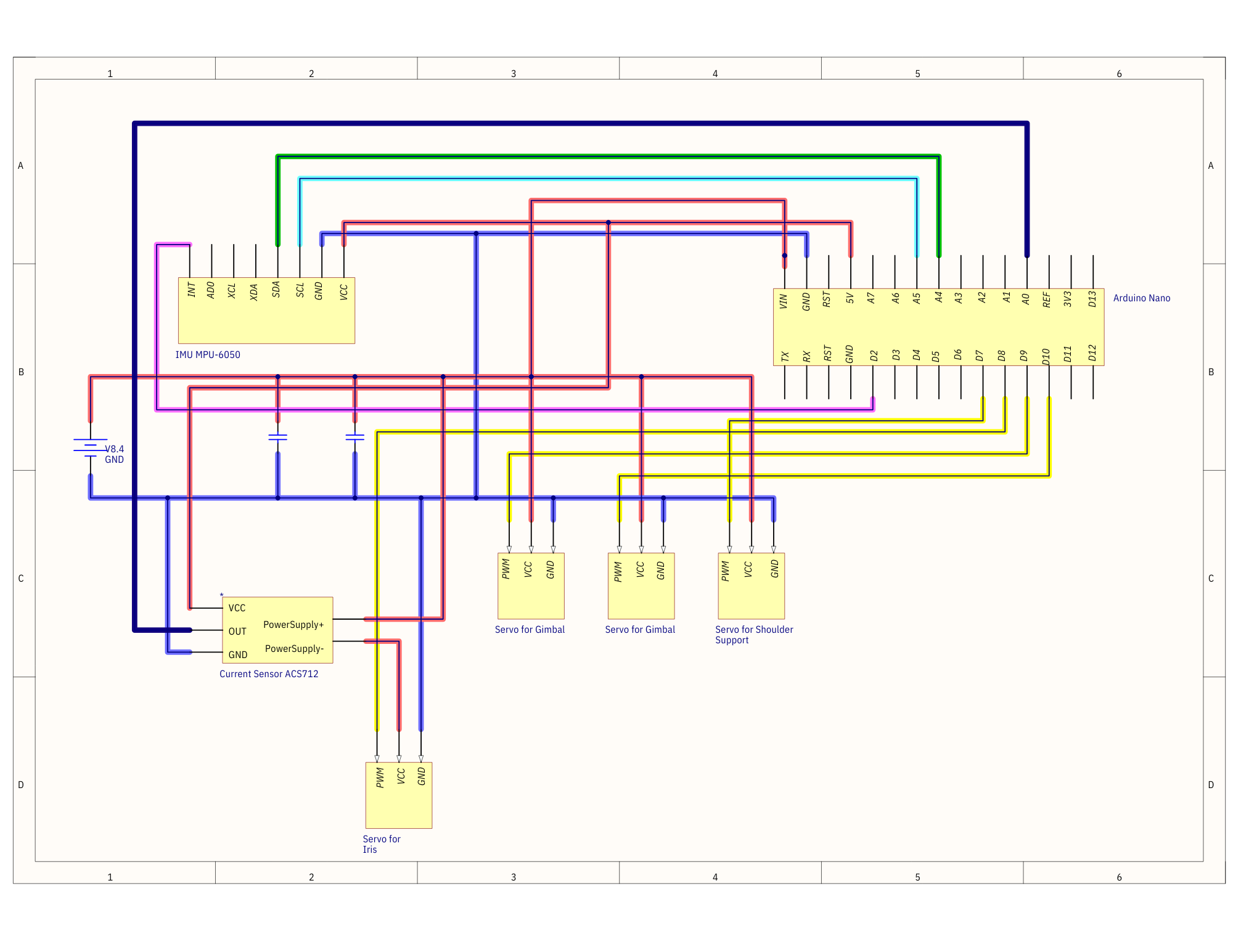
Circuit Schematic
-
Design
Inspiration
We were inspired by the simple mechanics of tools we already used, like camera gimbals and mechanical irises. We realized that the same technology used to keep a high-end camera steady could be repurposed to stabilize a drink for someone with limited hand strength. By combining the smooth, self-leveling motion of a gimbal with the adjustable grip of a camera lens iris, we wanted to build a device that feels less like a machine and more like a natural extension of the arm, making the act of grabbing a cup feel effortless.
What it does
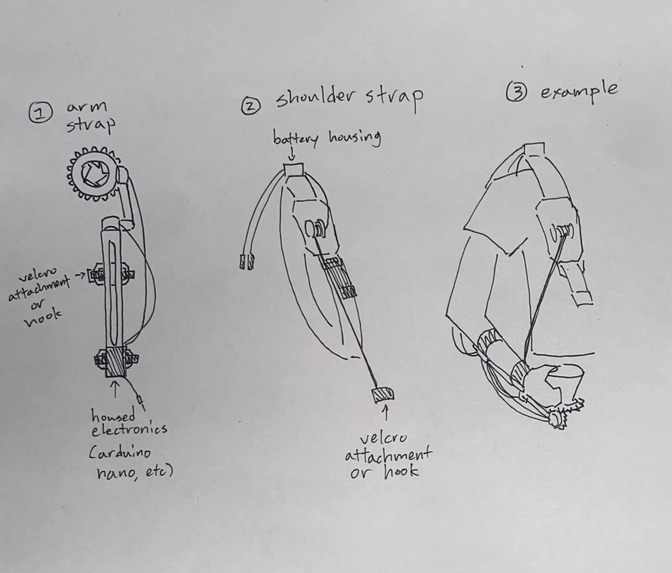
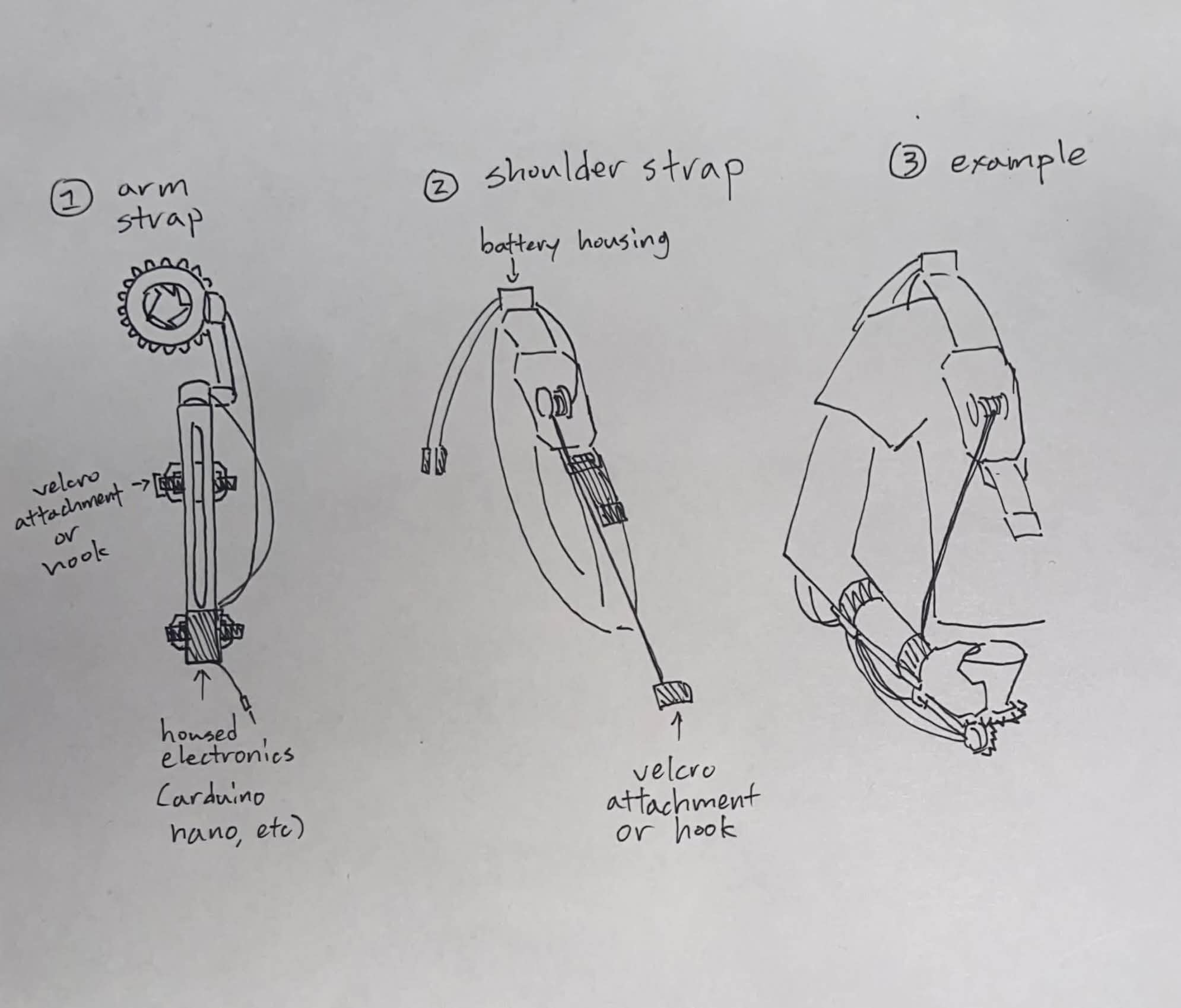
The main device straps on with two Velcro straps to the forearm of the recipient. Additionally, a shoulder strap houses the battery and a pulley system. The pulley system attaches to the main device with a string with a Velcro loop attachment and pulls the forearm towards the shoulder, mimicking the motion of raising the cup. The device itself features a stabilizing gimbal system to orient the cup correctly when the recipient tries to take a drink. In order to grasp different sized cups, the device uses a mechanical iris that closes and opens. When the user presses the button using the thumb, the iris closes, clamping on to the cup walls and the pulley starts rotating to bring in the wrist towards the shoulder via a nylon string so that the user is able to drink from the cup. The pulley system will rest 5 seconds before slowly releasing the wrist back to its original position. If the button is pressed again during raised position, the pulley system will remain stationary so the user can have longer time to sip from the cup.
How we built it
The assistive mechanism was designed to allow the recipient to stabilize and move a cup holder with minimal strength. Two Velcro straps are used to secure the mechanism to the arm and to distribute load evenly across a large surface area. The iris mechanism is actuated by a servomotor. When it is under stall conditions (when the iris cannot close any further), the servo would continue to apply torque and continue to try to close it and draw higher currents. To prevent gear damage and overheating of the servo, a current sensor is employed. When it detects a current spike, it will signal to the Arduino to stop the servo via a program. The shoulder support, gimbal systems, and sensors are all connected to an Arduino powered by a battery source located on the back of the shoulder to maintain compact wiring and ergonomic load distribution. The main mechanism is located beneath the forearm, with the iris mechanism located on the side of the palm. This geometry is used to mimic a natural grabbing motion while keeping the majority of the system mass close to the body, distributing weight better and improving comfort. Travel limits for the shoulder supports are enforced using limit switches to determine maximum range of rotation to protect over-rotation for both the system and the user.
Challenges we ran into
Our biggest challenge once we settled on our idea was deciding on whether to use 1 gimbal or 2 gimbals. While 1 gimbal would lower costs to manufacture this device, 2 gimbals would allow for more axis of rotation in order to better orient the cup towards the recipient’s mouth. It was also a challenge to fully visualize how the process of drinking would look like from the recipient’s point of view, as it was easy to get confused on how the axis of rotation would change depending on the orientation of the arm. Eventually, we decided that using 2 gimbals would be needed to for our device to be able to fully function. Another challenge was distributing the weight. Our recipient has almost no control of arm mobility, so we wanted to minimize the strength she would have to exert to lift the sippy cup. One approach was using carbon fiber material to maximize material strength while keeping the device lightweight. Another approach was using a pulley system to assist the recipient. Our triumph was in deciding to do both, as now we could tackle the problem from multiple angles.
Accomplishments that we're proud of
We are proud to be able to overcome real world constraint and think from the user's perspective. The main mechanism was intentionally placed beneath the forearm to keep the mass close to the body, improving comfort and better distributing weight. We considered safety by using a current sensor to prevent gear damage or overheating in the iris mechanism if it stalls. We learned to split tasks and collaborate between disciplines. We collaborated on how to integrate the Arduino Nano, battery and other electrical components with mechanical parts.
What we learned
In the process of designing this device and consulting the Brain Booth, we learned about a variety of technical knowledge. We learned about using epoxy in order to waterproof electronics, what goes in a gimbal, and how to design geometry to improve load distribution for users. Cindy learned about Fusion Motion links and how to design a gear cam mechanism. Hoek and Jason learned about limit switches and their applications.
What's next for Hug-A-Cup (Sippy Cup Holder)
Improve the mechanical iris mechanism by constraining its minimum diameter instead of allowing to close fully to 0 inches in diameter, allowing the switches to be smaller which compacts its design. Use brushless motor to improve gimbal functionality. Design a pressure sensor to replace the input button, letting the user do a grasping motion to activate the device for a more intuitive functionality, Design the assembly process for the device. Upload code using Arduino IDE to control to the servo motors, button output, sensor and other electronic components.
Built With
- altium
- autodesk-fusion-360
- solidworks


Log in or sign up for Devpost to join the conversation.