-
-
ASTRA Shoe Architecture (Greater Detail)
Inspiration
After witnessing SpaceX’s groundbreaking achievement of sending ordinary civilians into space, I was inspired by the immense potential of space travel and the possibility of establishing human colonies beyond Earth. This revolutionary shift in space exploration ignited a curiosity about the long-term effects of space travel on the human body. In particular, research into prolonged space missions reveals that astronauts experience severe muscle atrophy and bone density loss due to the microgravity environment. This results in a significant loss of motor function, with one of the most challenging consequences being the inability to walk properly upon returning to Earth. This inspired the development of A.S.T.R.A. — a dynamic, adaptive system that aids in the rehabilitation process upon re-entry to Earth's gravity.
What it does
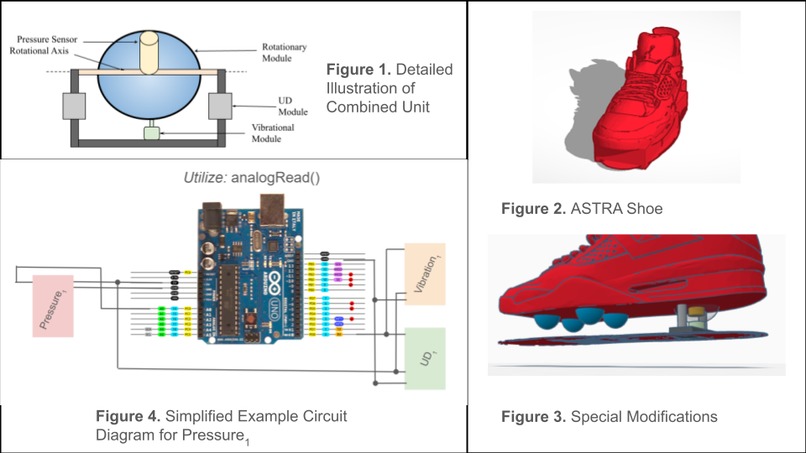
The A.S.T.R.A. system is a cutting-edge solution that divides the astronaut’s foot into five distinct zones, each equipped with an advanced "balancing module." These modules are engineered with a rotational gyroscope, pressure sensors, vibration actuators, and an Up-Down (UD) module, which can precisely adjust the elevation of specific foot regions in real-time. The system continuously monitors both the pressure distribution and angular deviations within each zone, comparing these readings against a calibrated baseline derived from the astronaut’s normal, pre-spaceflight gait. When deviations from the baseline are detected, the system autonomously compensates by redistributing pressure across the foot and activating the UD module to raise or lower affected areas. This process helps restore optimal pressure distribution and encourages proper alignment. Simultaneously, vibrational feedback is applied to gently guide the foot back to its correct position, promoting proprioception and helping the astronaut regain balance. Similarly, when abnormal rotational angles are detected, the gyroscopic module triggers an adjustment that rotates the foot module in the opposite direction, counteracting any imbalance, with vibration feedback further assisting the rebalancing process. This adaptive, real-time response ensures that the astronaut’s gait is constantly corrected, maintaining stability and promoting functional mobility. By continuously recalibrating the system in response to dynamic changes, A.S.T.R.A. not only enhances balance and day-to-day functionality but also plays a crucial role in mitigating the difficulties astronauts face during their return to Earth's gravity. Through its innovative approach, the system supports the astronaut’s rehabilitation, accelerating the learning curve and reducing the time needed to regain normal movement patterns.
How we built it
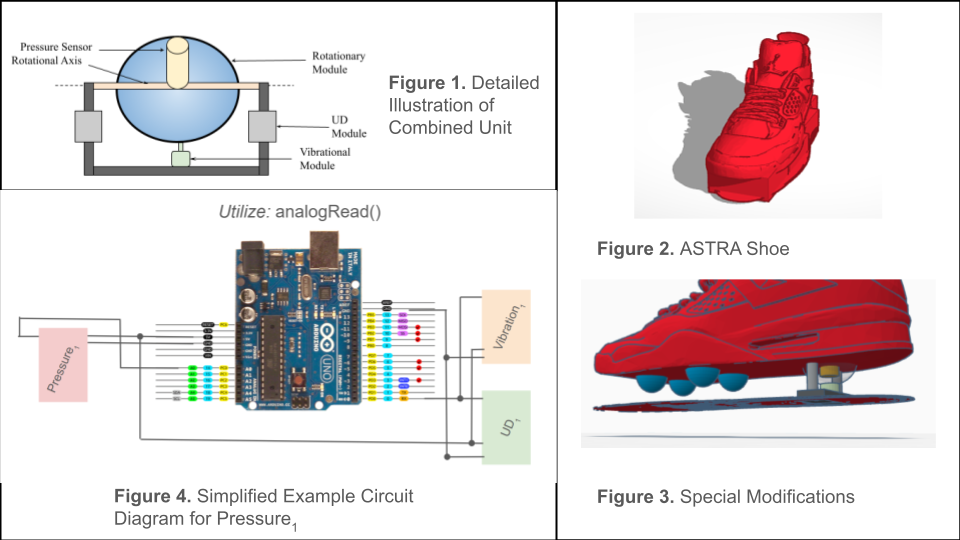
To bring the A.S.T.R.A. system to life, I began by utilizing Tinkercad, a cloud-based 3D modeling software, to design the shoe prototype and its corresponding components. This allowed me to visualize and iterate on the shoe's structure and the integration of the various modules within the footbed. For the electrical design, I leveraged online circuit building platforms to map out the sensor architectures and identify the correct pin configurations for the pressure sensors, gyroscopes, and other actuators. Given the nature of this hardware-centric project, I opted to work with the Arduino platform for prototyping the system’s functionality. Arduino's combination of C++ and Python allowed me to program the components to interact seamlessly, enabling me to fine-tune the system’s responses to pressure and angular deviations as desired. Through this iterative process, I ensured the components not only functioned correctly but also adhered to the real-time feedback methodology essential for the success of the A.S.T.R.A. system.
Challenges we ran into
One of the primary challenges I encountered during the development of the A.S.T.R.A. system was designing the shoe and its integrated balancing modules. Given the need to position multiple sensors precisely within specific zones of the foot, I faced difficulties in creating an architecture that allowed for seamless integration and synchronization of all components. This required a deep understanding of both sensor integration and the dynamics of foot movement, which was challenging to achieve within the constraints of the design. Furthermore, as this was my first experience with CAD (Computer-Aided Design), I faced a steep learning curve in accurately modeling the shoe prototype and ensuring that each sensor and actuator was properly placed. On the software side, programming proved to be another significant hurdle. The system’s design relied on an abstract scenario where I had to simulate real-world conditions without direct data or physical testing, necessitating the assumption of numerous variables. This added layers of complexity to the coding and fine-tuning process. However, through careful planning, iterative prototyping, and consistent effort, I overcame these challenges and successfully developed a functional model that aligns with my initial vision.
Accomplishments that we're proud of
Throughout the development of the A.S.T.R.A. system, I achieved several key accomplishments. I successfully utilized CAD for the first time to design a complex shoe model and integrate various components such as sensors and actuators. This was a critical step in visualizing the system and ensuring that all components fit together properly. I also gained proficiency in writing C++ code, which was essential for programming the functionality of the sensors and modules within the A.S.T.R.A. system. Additionally, I completed my first hardware electrical engineering project, taking it from conceptualization and design to implementing the software architecture and simulating real-world scenarios. This project marked my first experience working on a system that integrates both software and hardware components, offering invaluable insight into the multidisciplinary nature of the task.
What we learned
During the process, I learned that integrating hardware within strict physical limitations is no easy feat. It was essential to consider the physical space for each component while ensuring that the sensors, actuators, and other parts functioned as expected. I also learned how to describe code in a simplified format, which helped communicate technical concepts more effectively. Furthermore, I realized the importance of proper planning before execution, as ensuring that each piece of the project was aligned with the others required careful thought and coordination.
What's next for A.S.T.R.A.
Looking ahead, the next step is developing and testing the physical prototype of the A.S.T.R.A. system. This will involve refining the algorithms, incorporating artificial intelligence to improve the system's adaptability, and enhancing the app design and code. By testing the prototype in real-world conditions, I will be able to validate the functionality of the system and make necessary adjustments to ensure it meets the goals set for astronaut rehabilitation.

Log in or sign up for Devpost to join the conversation.