Inspiration
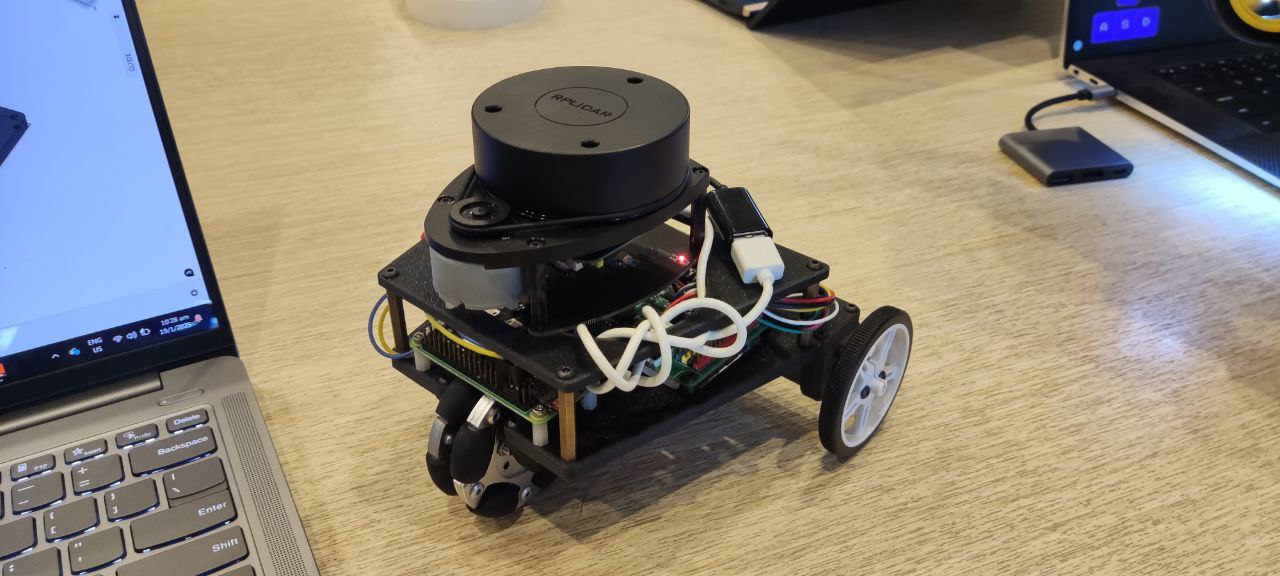
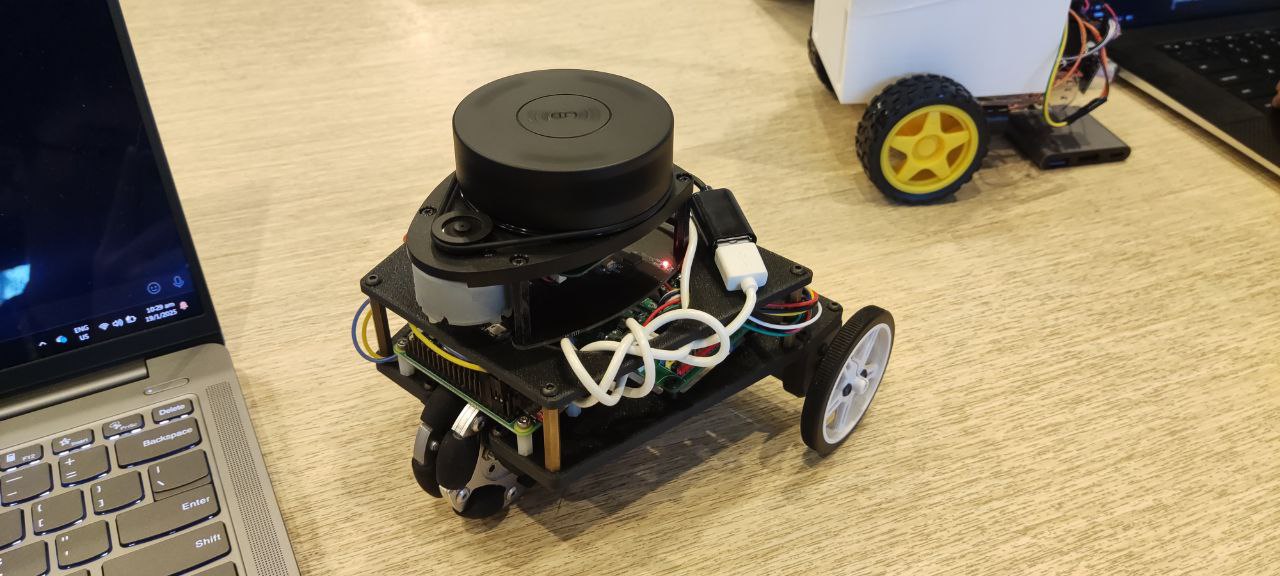
Honestly, I've had an RPLidar A1 lying around for months without any opportunities to use it. So over winter break, I designed a robot for it, without knowing exactly what I would use it for....until Hack&Roll. The robot is built using my custom hardware prototyping platform EVN.
What it does
It "stares" at you by keeping track of fast angular movements around it and turning to a heading where those movements end.
How we built it
By using an optical flow algorithm and doing curve fitting on the lidar's points, we could use lidar to find angular velocity (ang. displacement over time). This (to me) is pretty unique, since LiDAR is typically thought of as a distance and mapping-only tool.
Challenges we ran into
Ended up unnecessarily re-flashing my RPi Zero 2W's SD card as it stopped connecting to WiFi. Turns out it was because the UART cables were connected.
Also had some challenge optimizing the code to (at the bare minimum) use NumPy and SciPy for math operations instead of pure Python. And of course, diagnosing mistypen mathematics in code is always pretty tricky.
Accomplishments that we're proud of
Learning ROS, and more or less completing what I set out to do today :)
What we learned
I learned how the ROS programming paradigms work, and implemented some nifty algorithms on a new sensor I've never tried before. Tons of fun
What's next for A robot that stares at you
More than staring, hopefully


Log in or sign up for Devpost to join the conversation.