-
-
Robot Overview
-
Robot in progress
-
Working :)
-
Main Page of the Website
-
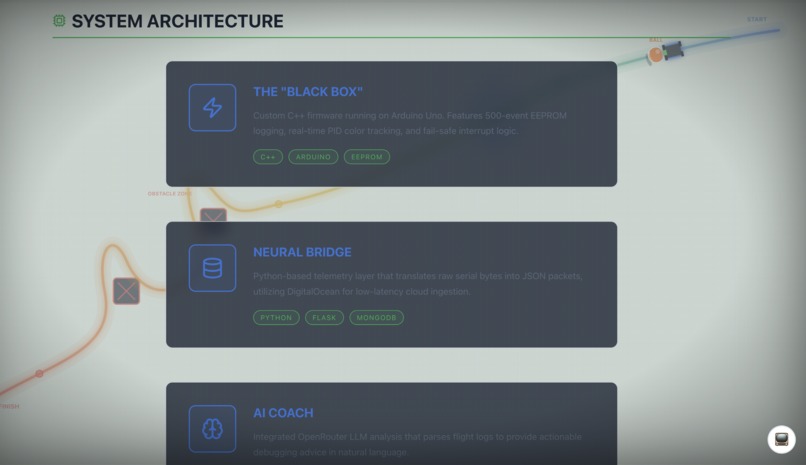
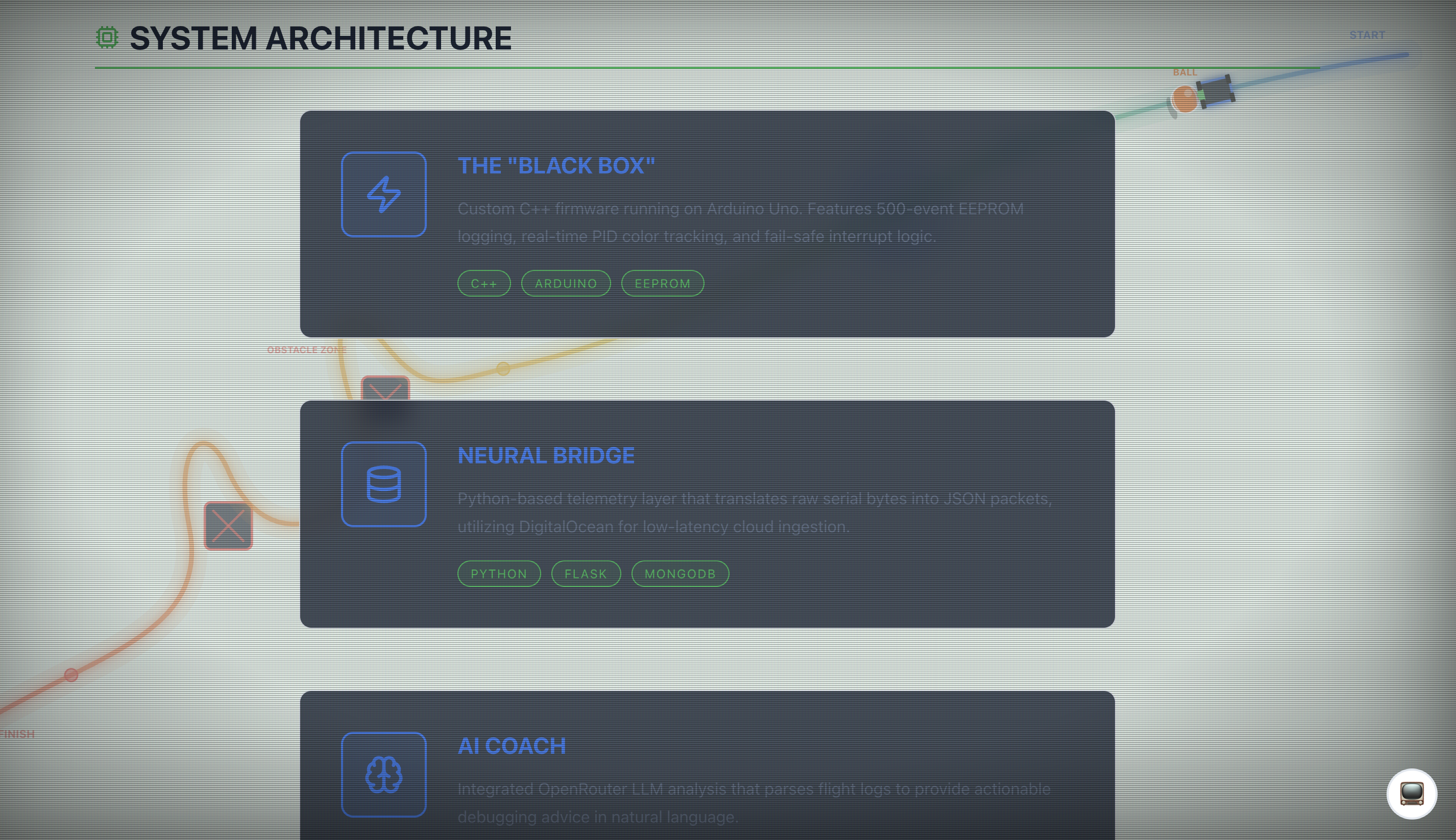
System Architecture
-
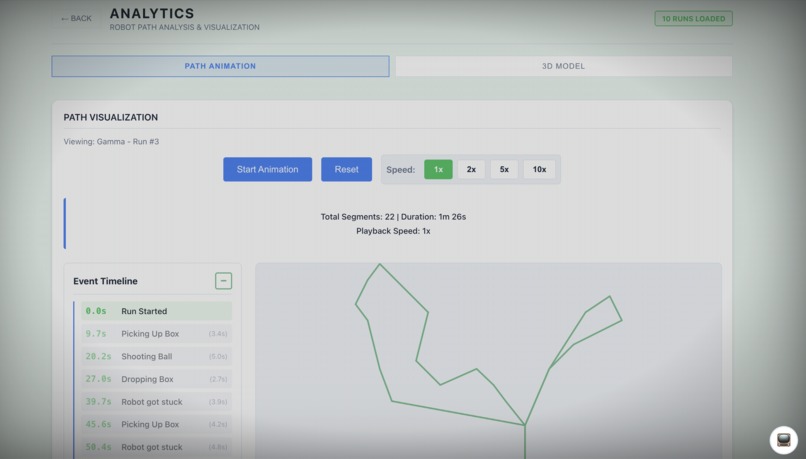
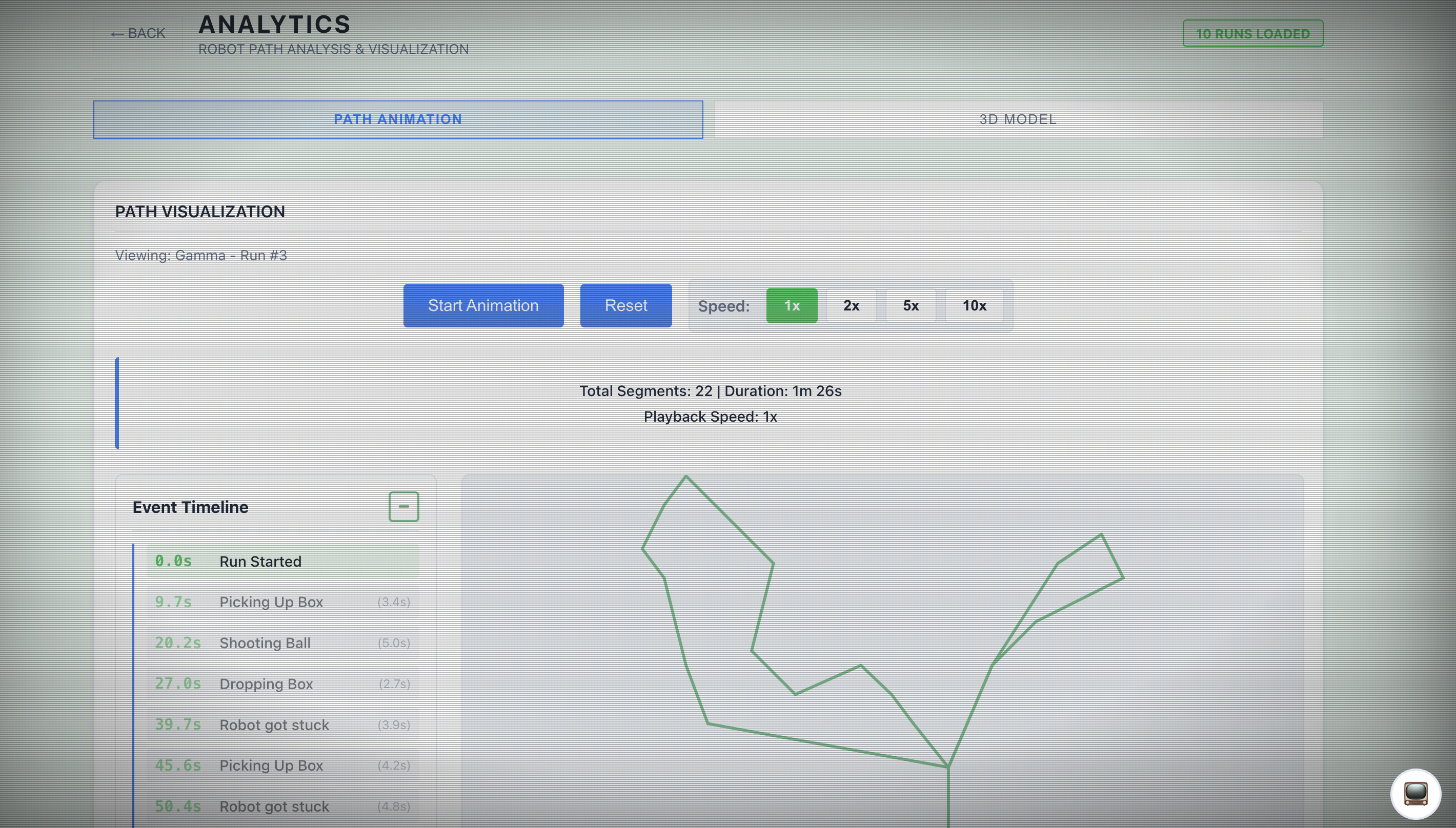
2D Simulation of the Robot Path
-
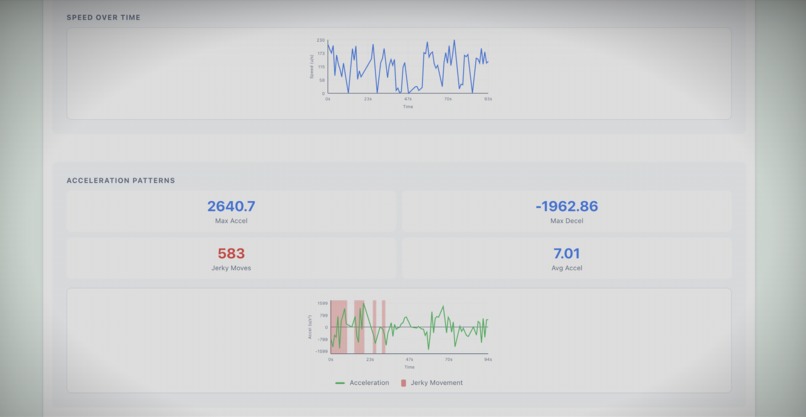
Speed and Velocity Chart
-
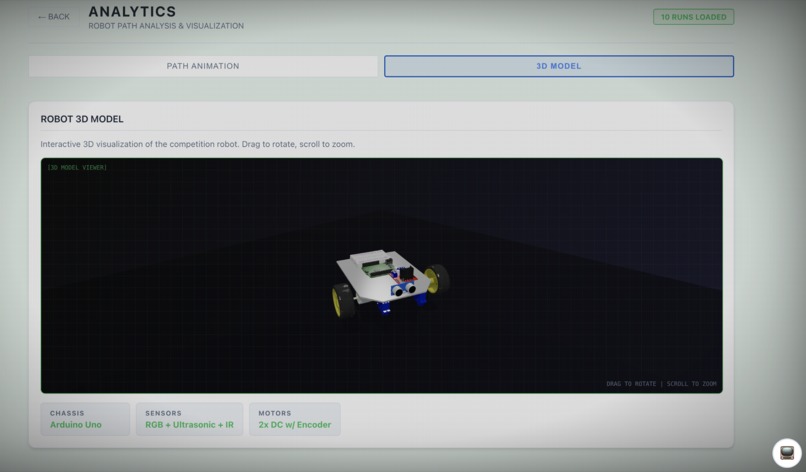
3D Modeling of the Robot

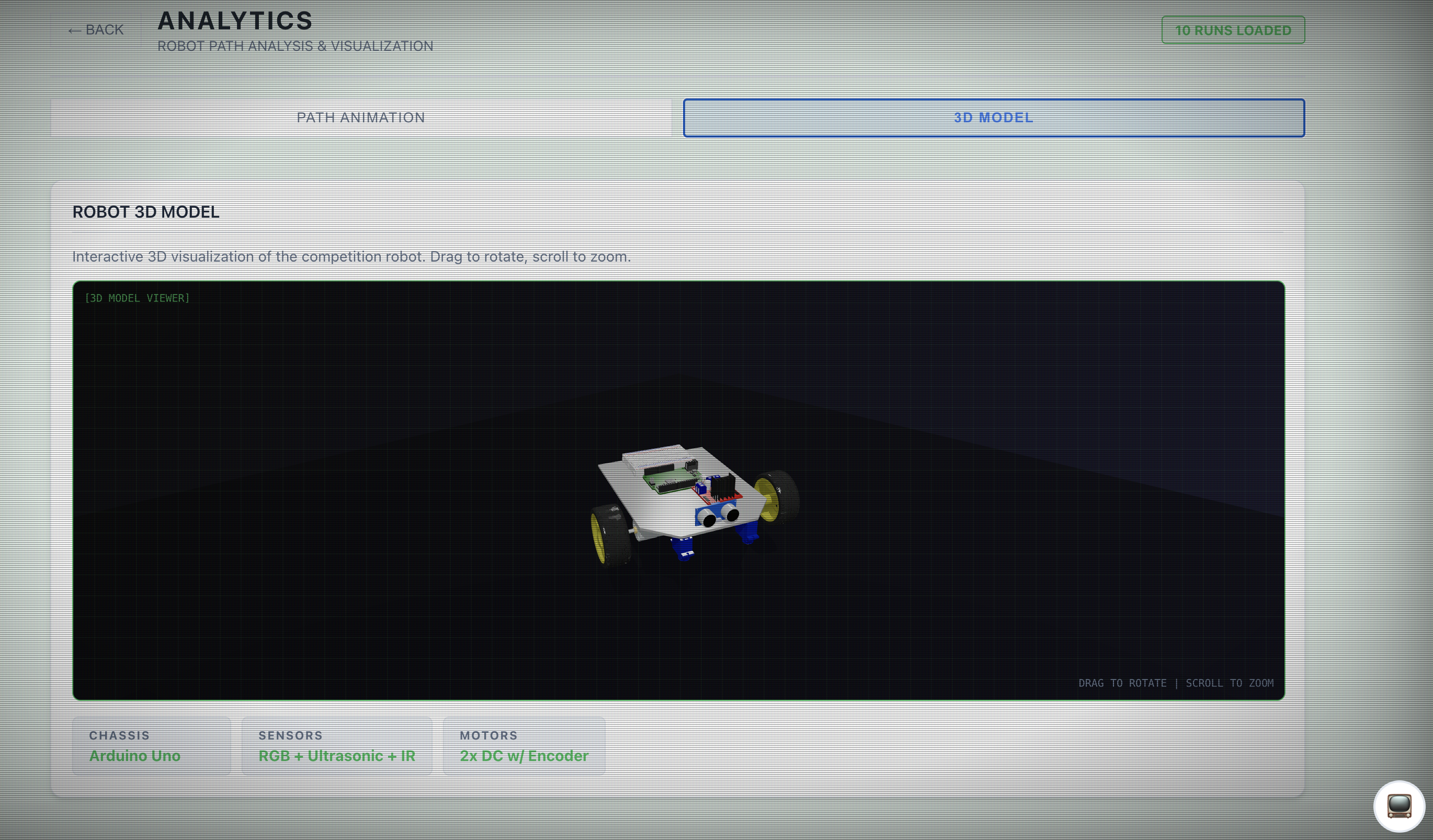
Our initial concept explored anthropomorphic manipulation, but component constraints necessitated a more pragmatic approach. We shifted our focus to the interaction between the robot and the object, resulting in a streamlined mechanism featuring a 3D printed attachment driven by a single servo. This simplified design allowed us to prioritize sensor integration and accuracy, particularly for the TSC230 color sensor, without compromising mobility.
The most significant hurdle was developing comprehensive control software under strict time constraints. Although we established a functional logic early in the ideation phase, executing code that reliably covered the entire track proved difficult within the final fifteen hours of the project.
To facilitate rapid improvement, we developed a custom data analysis tool alongside our drive code. This system recorded motion data across multiple axes to track turning behavior, drift patterns, and acceleration stability. The software visualized these metrics to identify performance issues immediately. Furthermore, it provided AI-generated feedback that translated raw data into actionable directives, such as adjusting turn durations or implementing gradual speed ramping. This workflow transformed the debugging process from guesswork into a precise and evidence-based strategy.
This project reinforced several core engineering principles. First, mechanical simplicity is superior under time pressure; a basic servo attachment proved far more reliable than a complex claw. Second, hardware and software are intrinsically linked, as sensor performance relies as much on mounting and environmental factors as it does on logic. Third, robust systems require recovery behaviors to handle the unpredictability of physical environments. Finally, we found that data-driven iteration significantly outpaces manual tuning and that early division of labor is critical for effective time management.



Log in or sign up for Devpost to join the conversation.