-
-
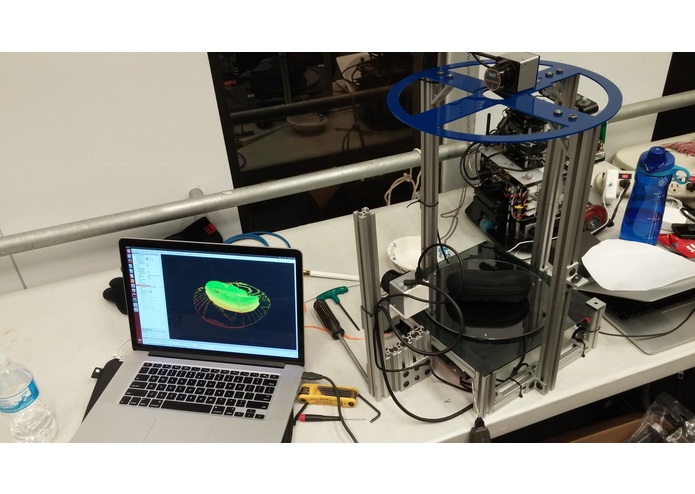
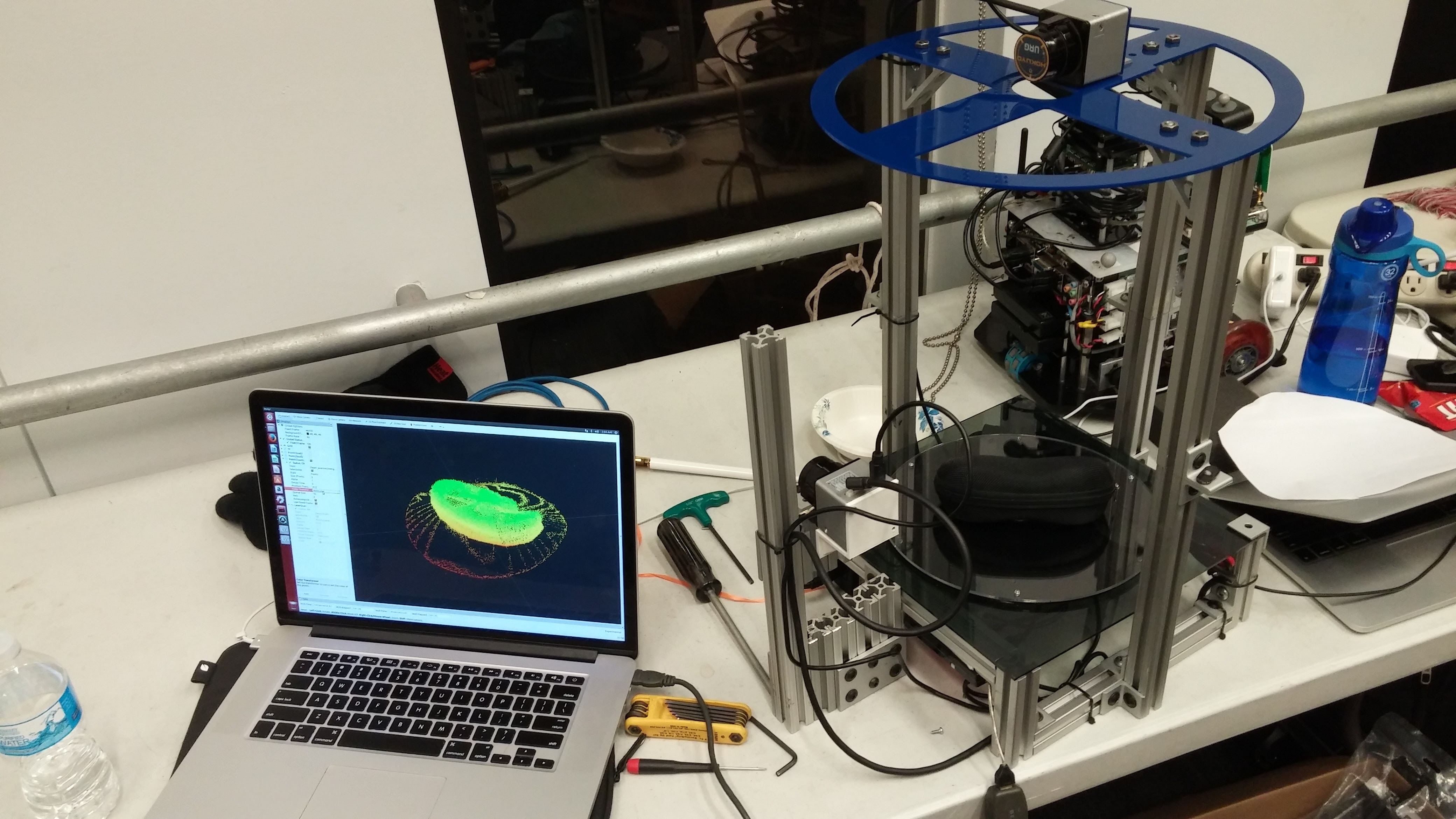
Entire setup scanning a glasses case.
-

Wiring beneath the scanner.
Inspiration
We all have experience with 3d printers and would often print pieces like phone cases or tool holders. However, in order to replicate these objects we'd need to take detailed measurements, and then CAD the parts which would all be far too tedious for the task.
So we decided to create our own 3d scanner.
Now we're able to scan a phone and have the exact dimensions down to millimeters for our case. We can scan tools in order to create molds for a tool case without needing to use any calipers.
What it does
You place an object on the motorized turn table, and two Lidars create a 3d model of the object and export it into MeshLab. The LIDAR technology allows you to scan models with millimeter precision. Using this setup, you no longer need to measure objects, or find their drawings online, but instead can be directly given the accurate 3d model.
How we built it
We use ROS to control the motor, receive the Lidar data, and process all the data. All the supports are built from 80/20 framing system. The turn table, bottom and top tables, were laser cut. The side Lidar mount was 3d printed with makerbots, and the top Lidar mount was also laser cut. Our github repository can be found below.
Challenges we ran into with solutions
Many of the motors we originally attempted to work with were not acceptable because they were lacking encoders, or had too low resolution. -- We are using a MX-28 dynamixel motor.
We didn't have a power supply for our setup. -- We replaced a laptop charger connector with our own connectors so it could be compatible with our motor and Lidars.
The model that was originally generate was filled with excessive noise from the vertical supports, the reflective acrylic turn table, and other mounting obstacles. -- We had to create cropping boundaries and ignore the reflective surfaces.
A smooth flat surface kept displaying as crooked and curved. -- We moved the Lidar further back, and tried again with other objects. The material of the original object (a lotion bottle) could have been the issue.
The point cloud was often unclear and imprecise. -- We were stuck on this issue for hours and couldn't figure out a consistent solution. maybe we should be using newer Lidars.
Accomplishments that we're proud of
All of this is a totally new field for several of us and being able to contribute to this project. Most of all, however, is that we were able to finish the hardware aspects of the project hours before the due date and could use the rest of the time for software testing.



Log in or sign up for Devpost to join the conversation.