-
-

Logo
-
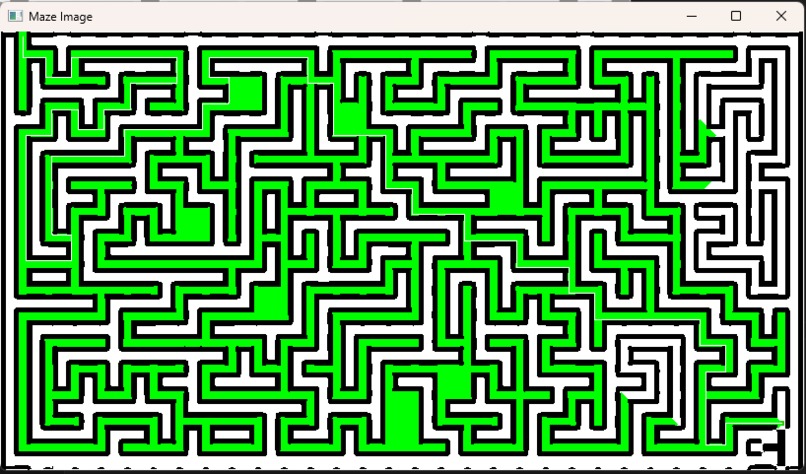
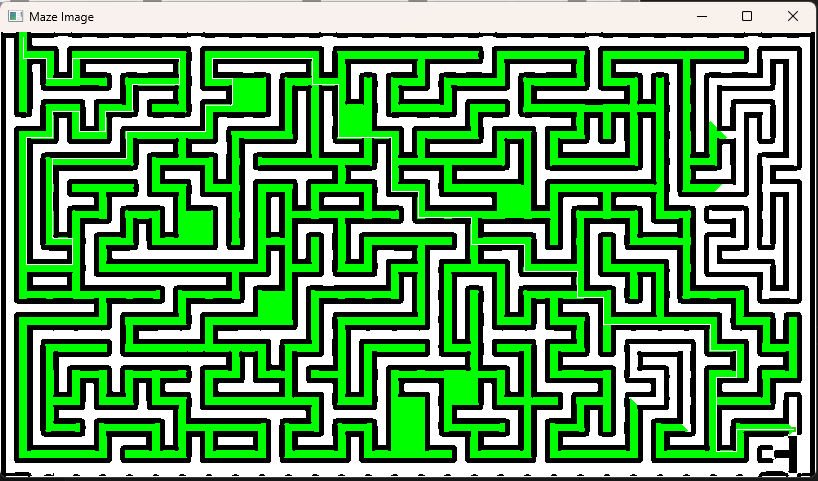
Solved maze 1
-
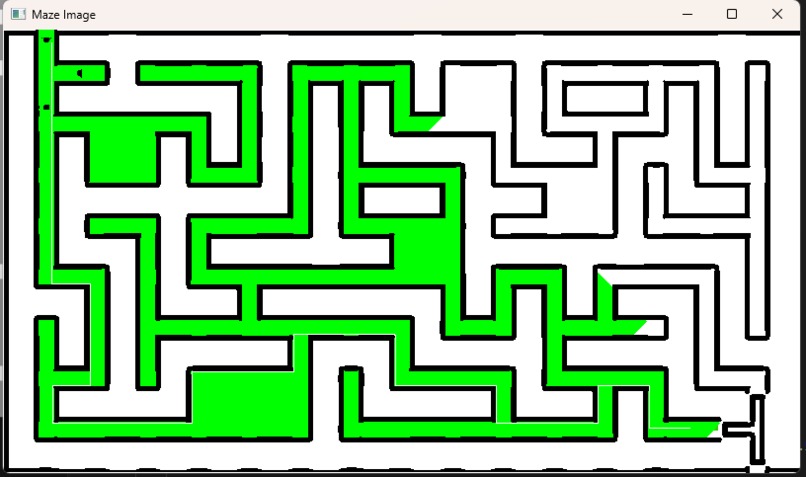
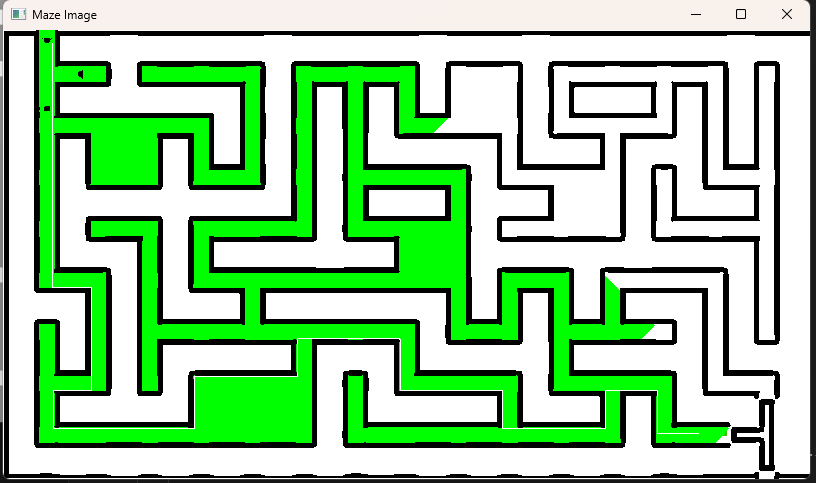
Solved maze 2
-
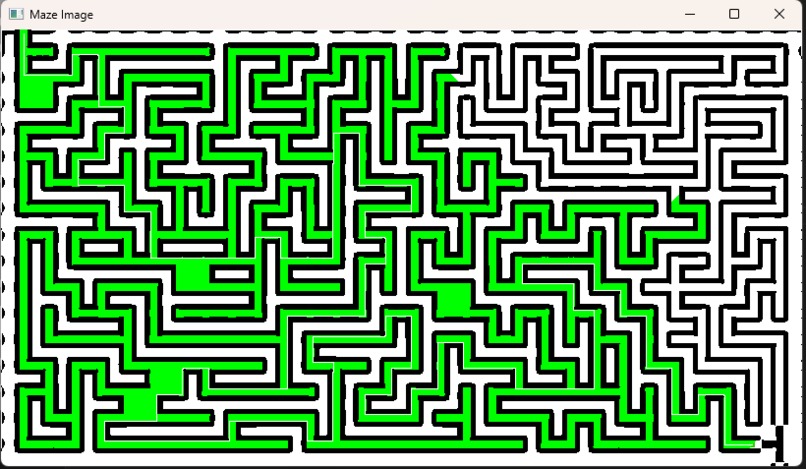
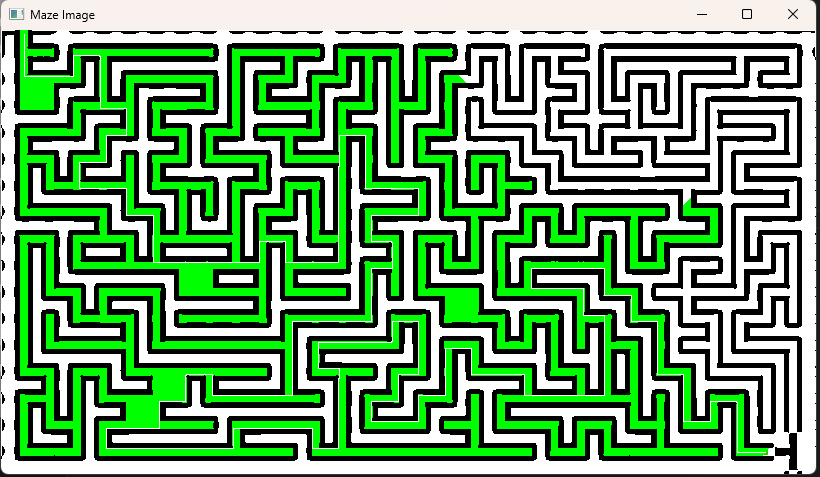
Solved maze 3
-
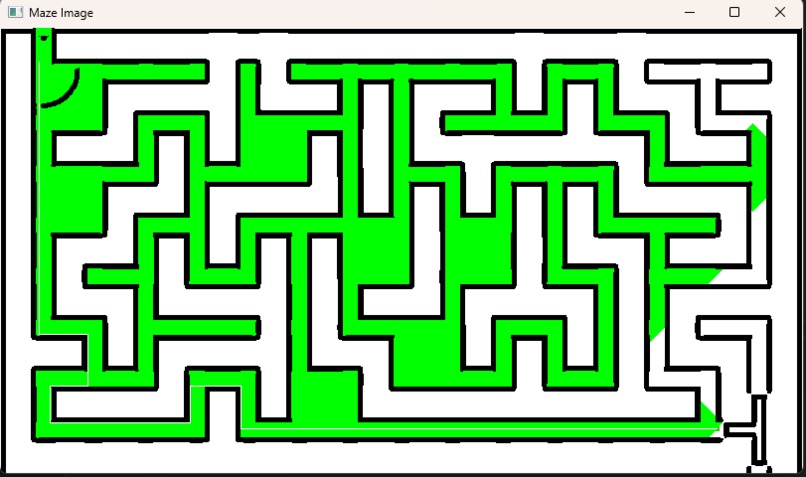
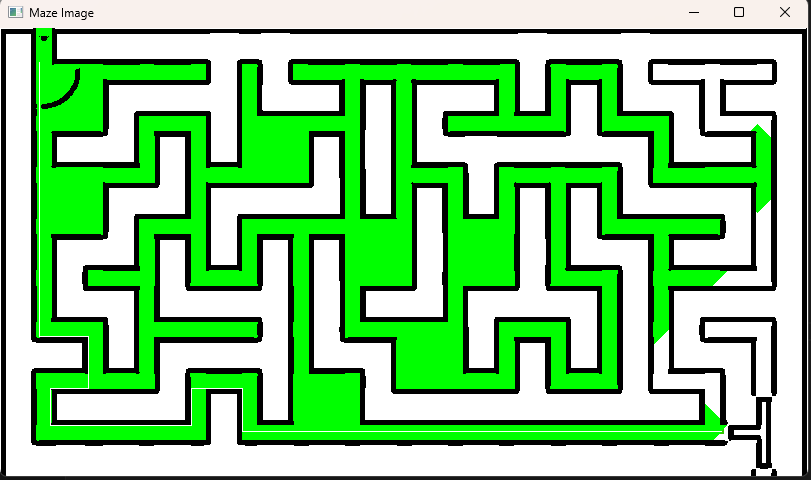
Solved maze 4

Inspiration
My inspiration for 360PathFinder stemmed from the need for efficient pathfinding solutions in 360-degree environments. I was intrigued by the challenges posed in navigating complex spatial layouts captured in panoramic images and sought to develop a solution that could facilitate efficient route planning in such environments. The spark for this project ignited during the 418 Hackathon, where I encountered the problem statement addressing the complexities of pathfinding in immersive visual environments. I found the problem statement to be very interesting and saw it as an opportunity to delve into the realm of panoramic image analysis and develop a novel solution to address this challenge. 🌐
What it does
360PathFinder is a real-time pathfinding algorithm designed specifically for 360-degree image analysis. 🛤️ It takes as input a panoramic image and identifies optimal paths from a given starting point to a designated destination within the image. By leveraging advanced image processing techniques and graph-based algorithms, 360PathFinder offers users a seamless and intuitive way to navigate through immersive visual environments.
How I built it
I built 360PathFinder using a combination of Python and image processing libraries such as OpenCV. The algorithm employs graph-based traversal techniques to analyze the panoramic image and identify viable routes from the start to the end points. I also integrated intuitive user interfaces to enable users to interact with the tool easily and visualize the generated paths. 🖼️
Challenges I ran into
One of the main challenges I encountered was finding the left and right turns accurately within the 360-degree image. 🔀 Additionally, determining the correct number of turns in the path proved to be challenging, as the panoramic nature of the image introduced complexities in identifying the optimal route. Overcoming these challenges required extensive experimentation and optimization of my approach.
Accomplishments that I'm proud of
I am proud to have developed a robust pathfinding solution tailored specifically for 360-degree environments. My algorithm demonstrates high accuracy in identifying optimal paths while maintaining real-time performance, making it suitable for a wide range of applications, including virtual reality, gaming, and architectural visualization. I am particularly proud of the object-oriented programming (OOP) principles that underpin the robustness of my code, ensuring modularity, extensibility, and maintainability throughout the development process.
What I learned
Through the development of 360PathFinder, I gained valuable insights into the complexities of pathfinding in immersive visual environments. I honed my skills in image processing, algorithm design, and optimization, and learned how to effectively leverage graph-based techniques for route planning in panoramic images. Additionally, I gained a deeper understanding of the challenges and opportunities inherent in developing solutions for virtual reality and immersive technologies.
What's next for 360PathFinder
In the future, we envision expanding the capabilities of 360PathFinder to support dynamic pathfinding in real-time 360-degree video streams. We also plan to integrate machine learning algorithms to enhance obstacle detection and path prediction accuracy. Furthermore, we aim to explore applications of 360PathFinder in diverse domains such as autonomous navigation, augmented reality, and urban planning, thereby unlocking new possibilities for immersive spatial analysis and interaction. 🚀

Log in or sign up for Devpost to join the conversation.