


Inspiration
Being part of a group with members majoring in Software Engineering and Electrical Engineering, we wanted to build a design that bridged both programming and hardware design. This is what gave us the inspiration and motivation to build a Bluetooth RC Car utilizing the power of the Arduino Uno microcontroller.
What it does
The RC 3-Wheeled Car has the ability to drive fast with extreme precision and responsiveness. The controls include turning in both forward and backward directions. Yes, it can do donuts.
How we built it
The two programming languages we used were:
- C++
- Python
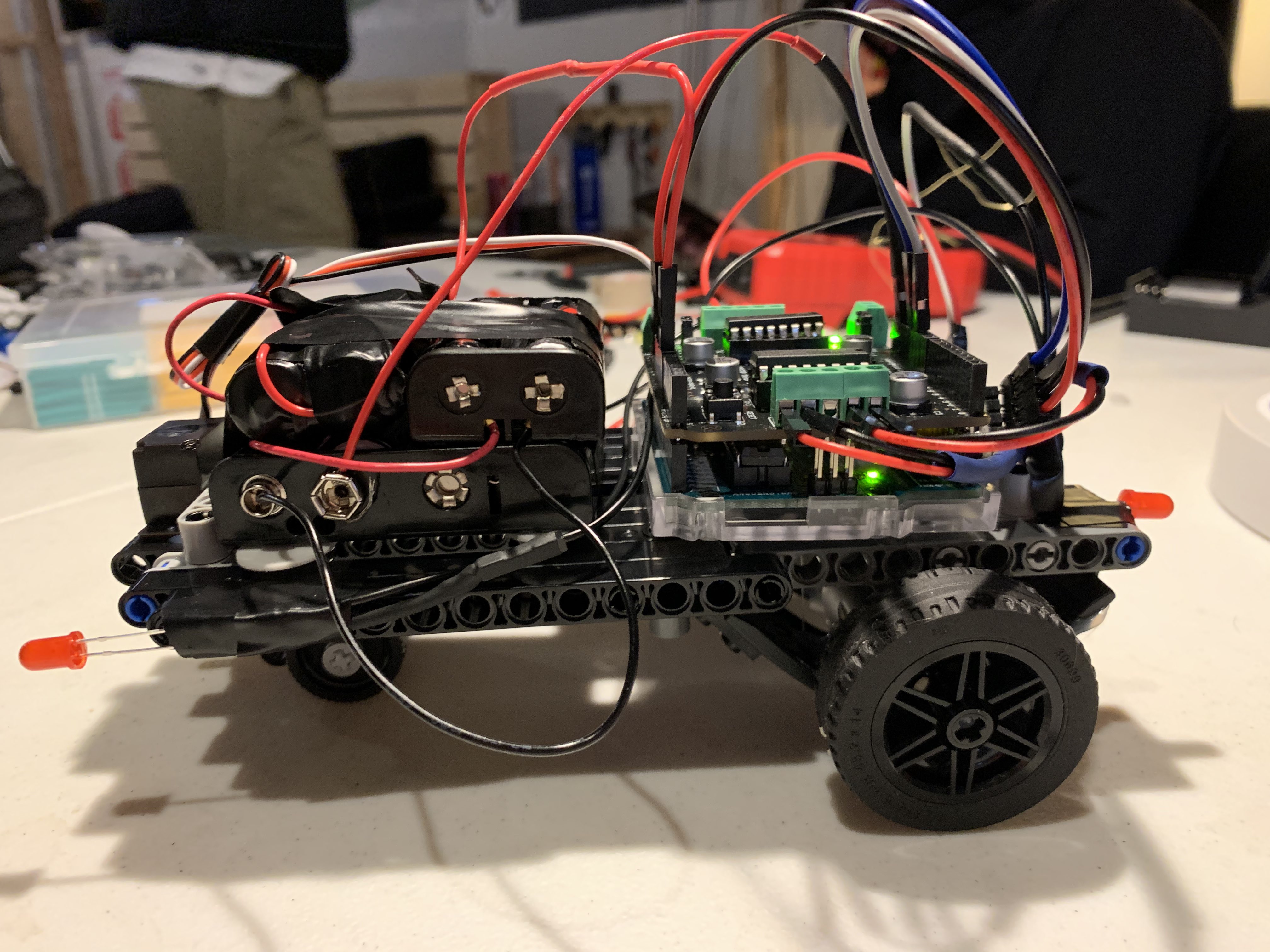
The design can be broken up into three main parts:
- Chassis
- We built the chassis using Lego technic pieces, two motors towards the back end, a servo in front to control the direction of the car, and wheels attached to the motors and servo.
- Arduino Uno
- Using C++, we programmed the motors for forward and backward control and the servo to rotate and guide the direction of the robot car. We also implemented LEDs so the front lights go on with forward movement and the back lights when the car is going in reverse.
- Bluetooth
- Using Python, we programmed the Bluetooth transceiver (HC-06) connected to the Arduino so that a user can control the robot car from a connected computer using the Python script.
Challenges
Our group ran into these main challenges (ordered in difficulty):
- Bluetooth connection between computer and Arduino (sending and processing signals)
- Keyboard control implementation
- Voltage power supply
- Weight distribution on frame + optimal frame structure
- Servo and motor control
Accomplishments that we're proud of
One of the biggest challenges was sending proper keyboard input via Bluetooth to the microcontroller. Slowly building up to figure out a solution was a team effort from all four members and pushed our engineering skills to the limit. To have it work out, in the end, was an accomplishment that made us proud.
What we learned
For this project, we learned the Arduino IDE, using both C++ and Python to execute the movements of the RC car, and basic circuit analysis techniques.
What's next for the Arduino Uno Robot Car
From this foundation, we can further develop our design to implement range detection, obstacle avoidance, a connected robot arm, or even use Machine Learning for the car to adapt to its surroundings.



Log in or sign up for Devpost to join the conversation.