


Inspiration
The Hurt locker, a movie with a rover that disarms bombs. We thought that this concept could also be used to deposit dangerous payload such as excavation explosives, or get rid of dangerous substances, on earth but also on different planets!
What it does
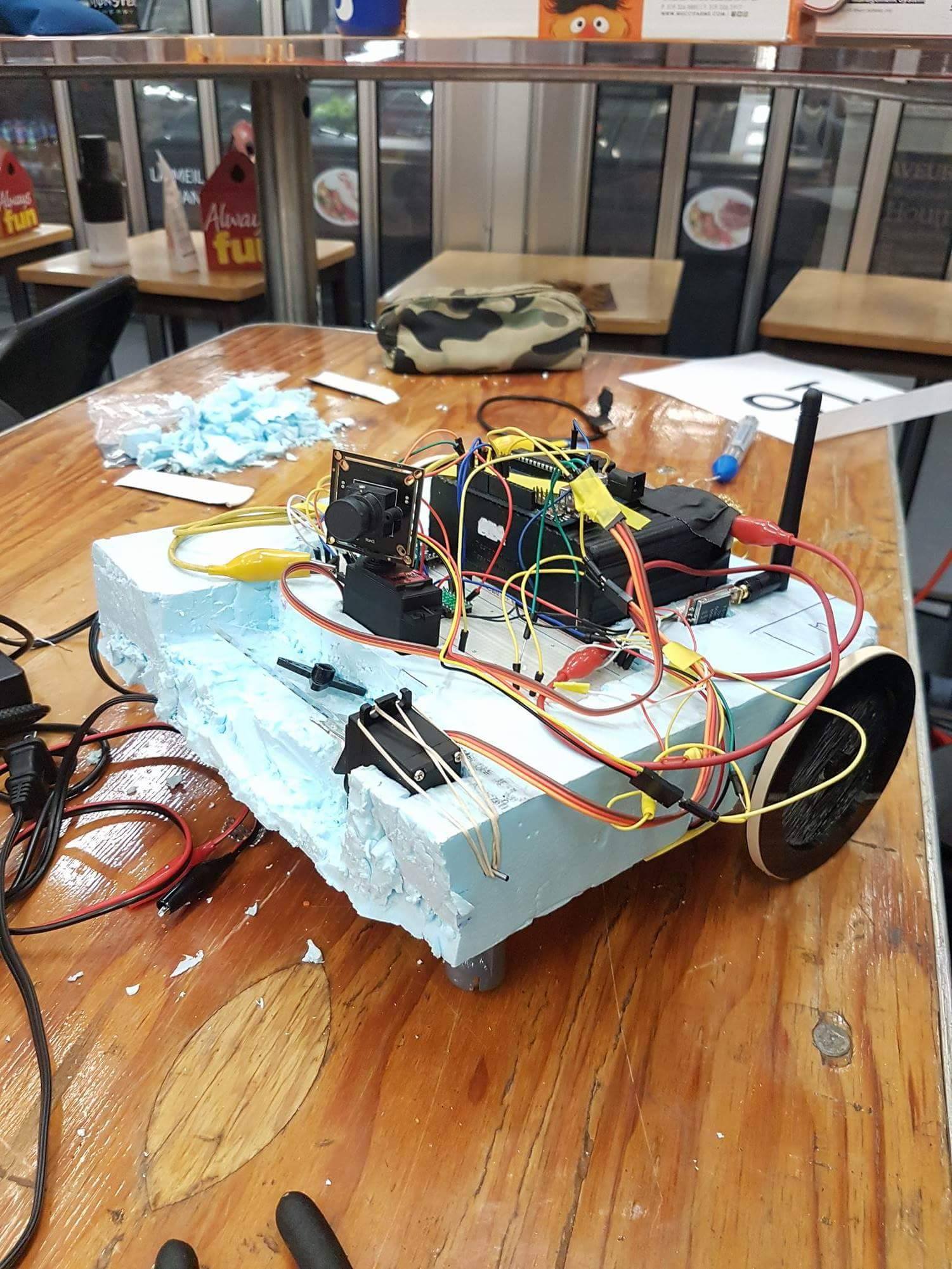
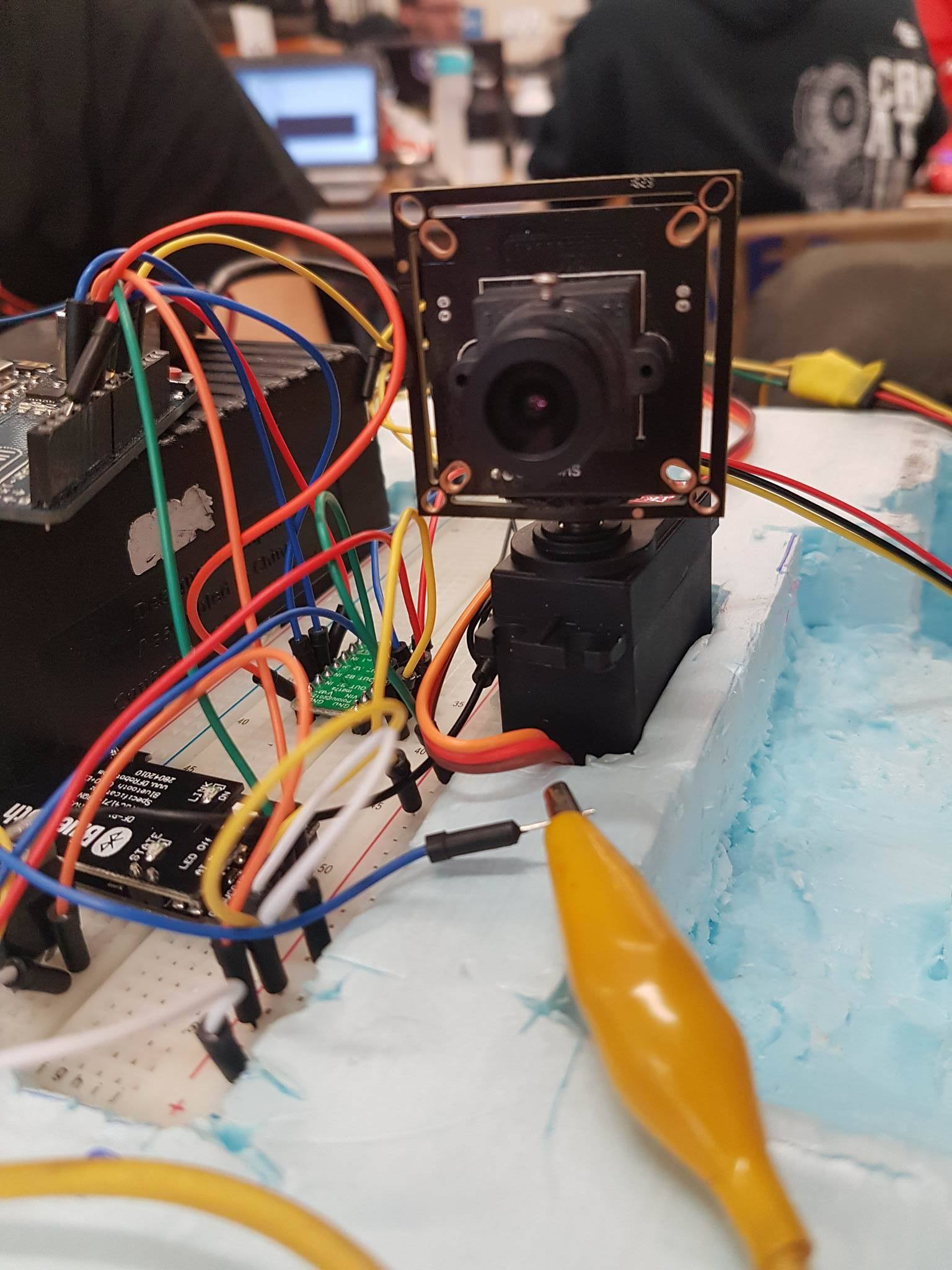
It is basically a rover with two 3D printed wheels equipped with a high quality camera. The camera is mounted on a servomotor that allows the user to spin it on 180 degrees, depending on the movements of the user's head. the movement is captured using a gyro, and a video feedback is given to the user via a FirstPersonViewer. We also built a custom controller to operate the motors, and a servo motor that deposits the payload when desired.
How we built it
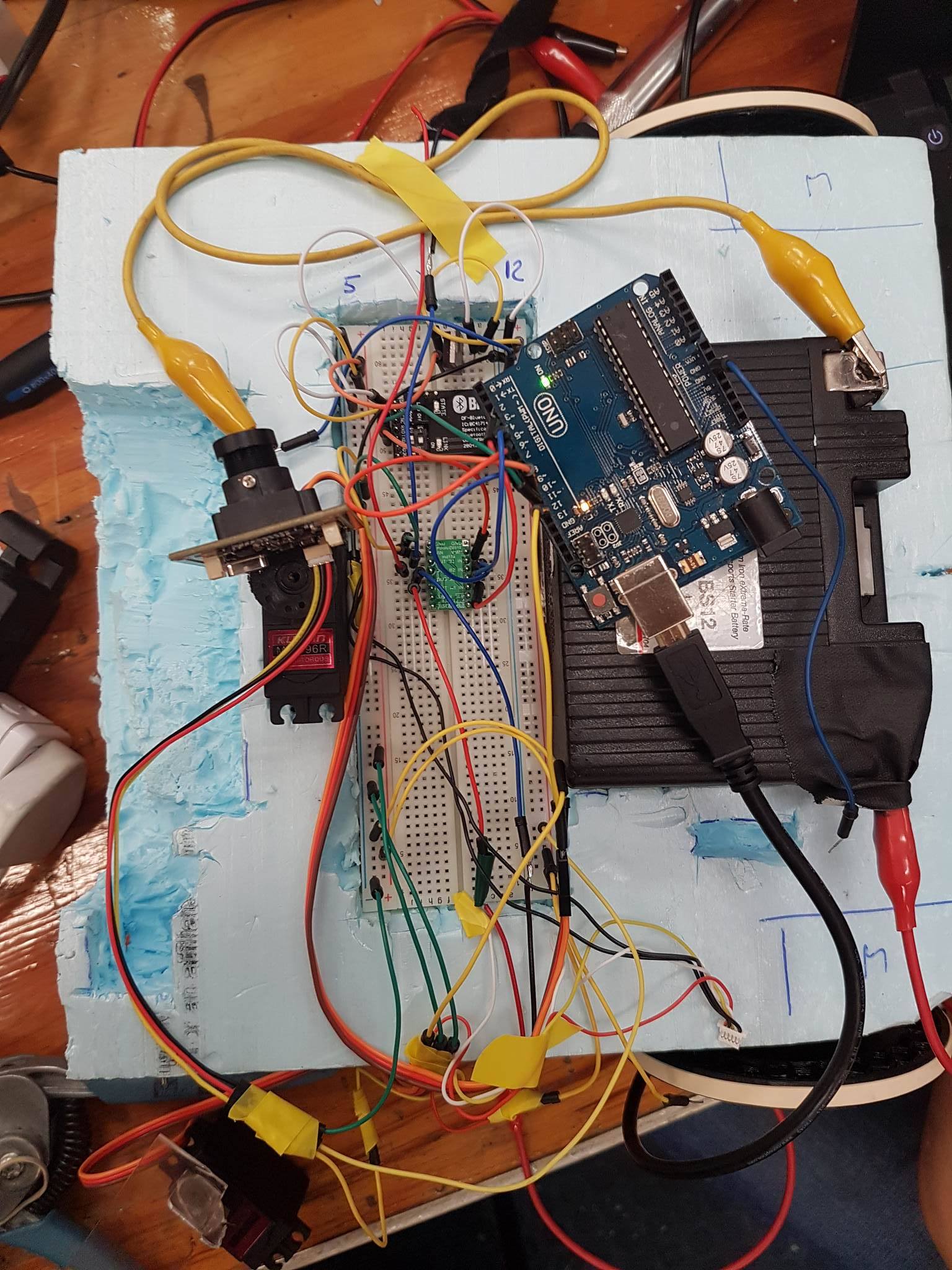
It is powered by a 12V shorai battery. First of all, we used an Arduino micro-controller to operate all the motors on the rover. This Arduino also receives data from another micro-controller, situated on our FPV. The FPV is basically a screen that retransmits the video feed, but we added a gyro and a bluetooth chip on it operated by a 2nd arduino. Using this system, we can send by bluetooth the data from the gyro controller on the head gear to the servomotor on the rover to operate the camera angle. The system to unload the payload is simply a acrylic plate tilted by a servo motor that thus drops the payload on the floor. The chassis is made of blue foam. We made that choice because it made it easy for us to incrust all our components in the foam. The driving wheels are 3D printed, custom made. The 2 free wheels at the front are from lego technical kits.
Challenges we ran into
Getting the code to transmit the data from one arduino to the other by bluetooth was pretty tough! We also had quite a few problems with the hardware, a few gyros gave up on us, as well as a servo motor and 2 bluetooth chips. We also had an interference problem when the arduino on the head gear was too close the the gyro. Our 3D printed had a few issues so the wheels that came out are not totally finished.
Accomplishments that we're proud of
Getting the software to work!!! It feels good to actually control a camera with the movements of your head! We spent the whole night digging on those issues. We are proud of our chassis solution, even though we couldn't find time to pimp it, we like the way we avoided a thousand bolts! Also, we are very happy about the fact that we started from scratch, without even an idea at 8am, and finished with this little friend!
What we learned
Too much stuff for a night..
- How to operate new hardware
- New issues that can come up with 3D printing
- To not always trust the hardware! We lost a lot of time trying to find errors in our code where it was simply a malfunctionning hardware..
- A night is enough to build really cool stuff
- Working with limited time, resources and sleep
- Collaborating with other teams, helping each others
- Glue is not always the best option
- A multimeter is the most important thing in life
- Red bull gives you wings but monsters makes you a lot stronger
What's next for 15 - Sensei
- A pimped chassis!!!
- A fully protected circuit
- More reliable hardware
- Finished wheels
- Smaller size
- A huge lamp
- A camera that requires less voltage and thus a smaller battery
Built With
- 3dprinting
- arduino
- fpv
- shorai

Log in or sign up for Devpost to join the conversation.