-
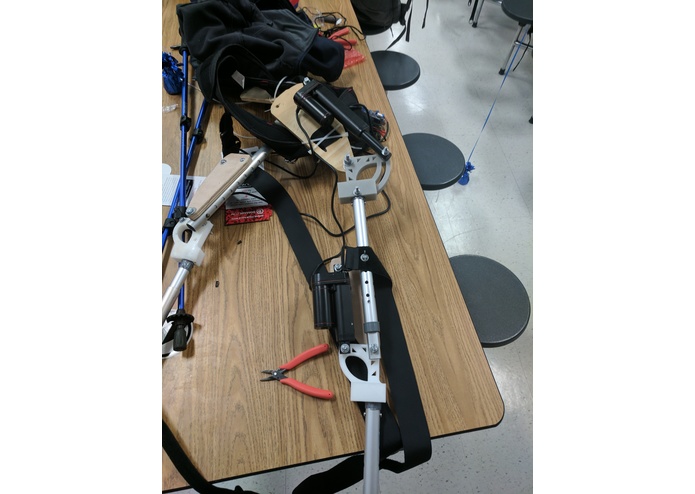
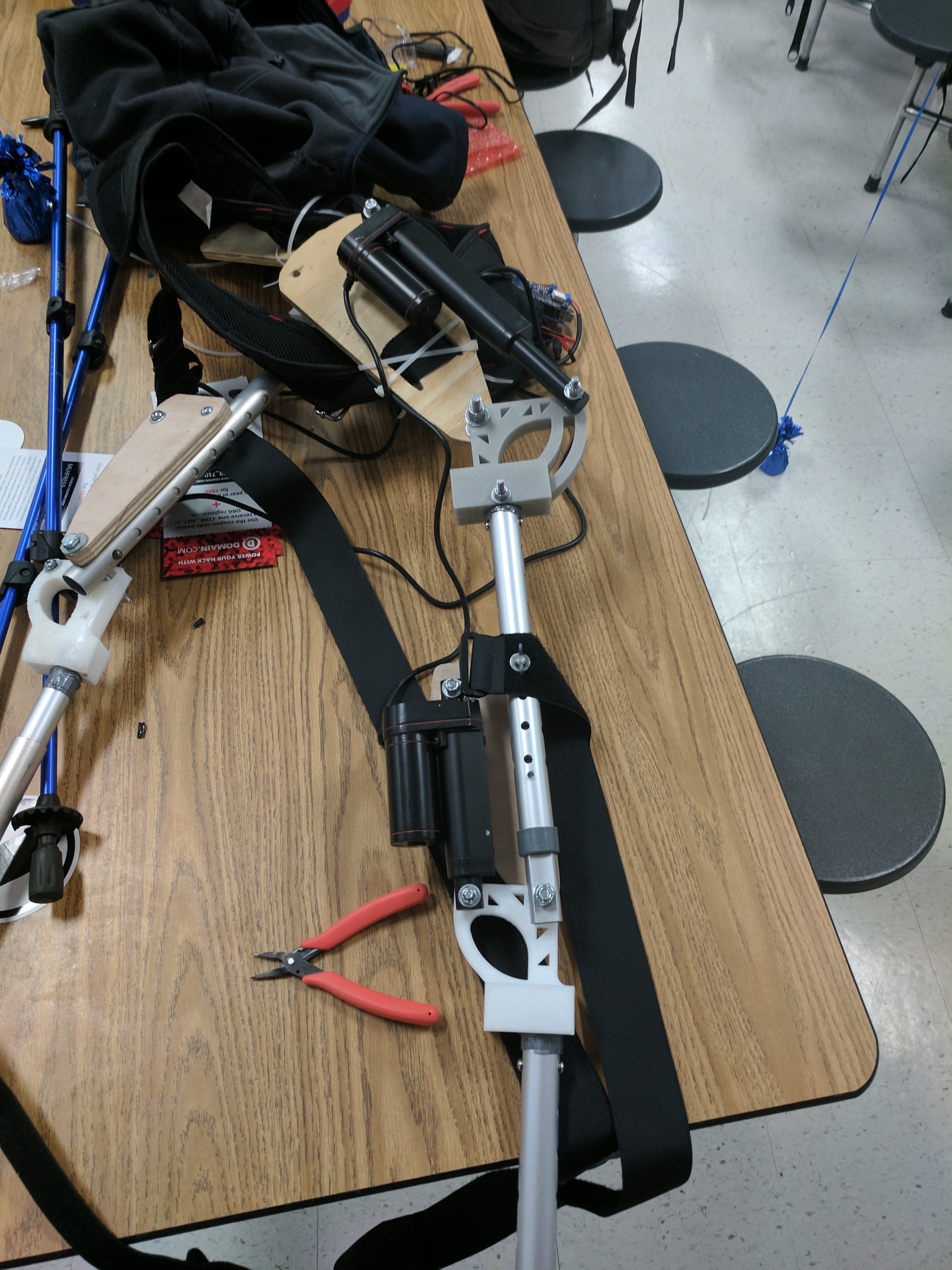
This is the finished build of one of the legs.
Inspiration
To create a cost effective, open source, exoskeleton for parapalegics.
What it does
It uses an Arduino and an inertial measurement unit to tell linear actualtors when to move joints that simulate the hip and knee.
How I built it
I used 3d printing and recycled aluminum rods from old crutches to create a leg that held onto the actuators and Arduino.
Challenges I ran into
The motor shields keep malfunctioning, only allowing one leg to work at a time.
Accomplishments that I'm proud of
I have been able to make a device that should be able to help many people. It will also be significantly cheaper than any other device similar to it.
What I learned
I have learned a lot about using the Arduino IDE with respect to the inertial measurement unit.
What's next for The Steward
The project will hopefully be able to work quicker in the future as well as more consistently. I also plan on making the files and code for the project public so that anyone can make this project.

Log in or sign up for Devpost to join the conversation.