-
-
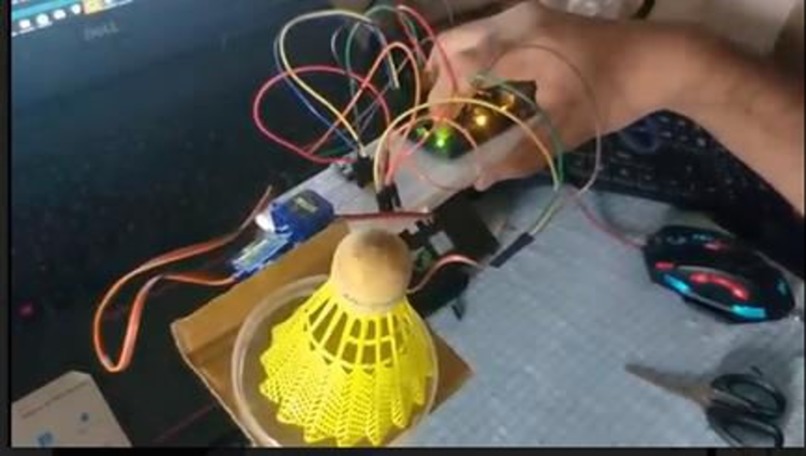
Hardware setup
-
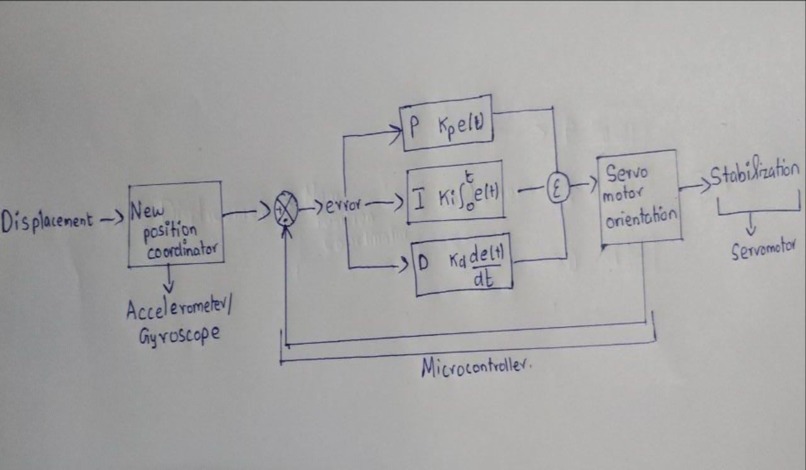
Block diagram for PID controller
-
website
-
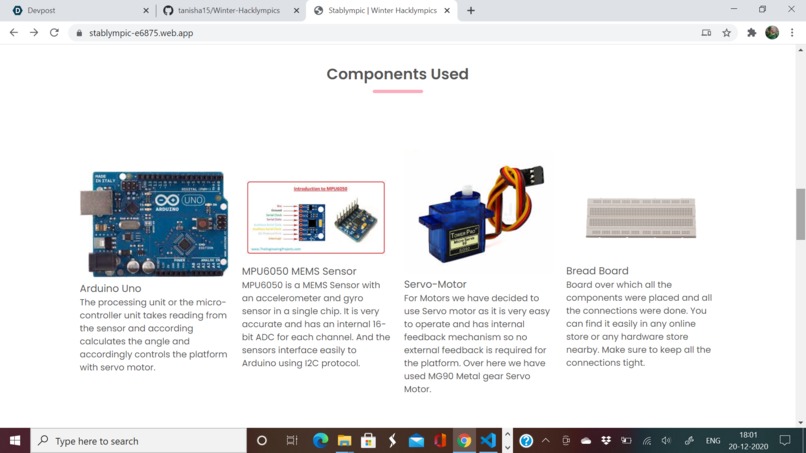
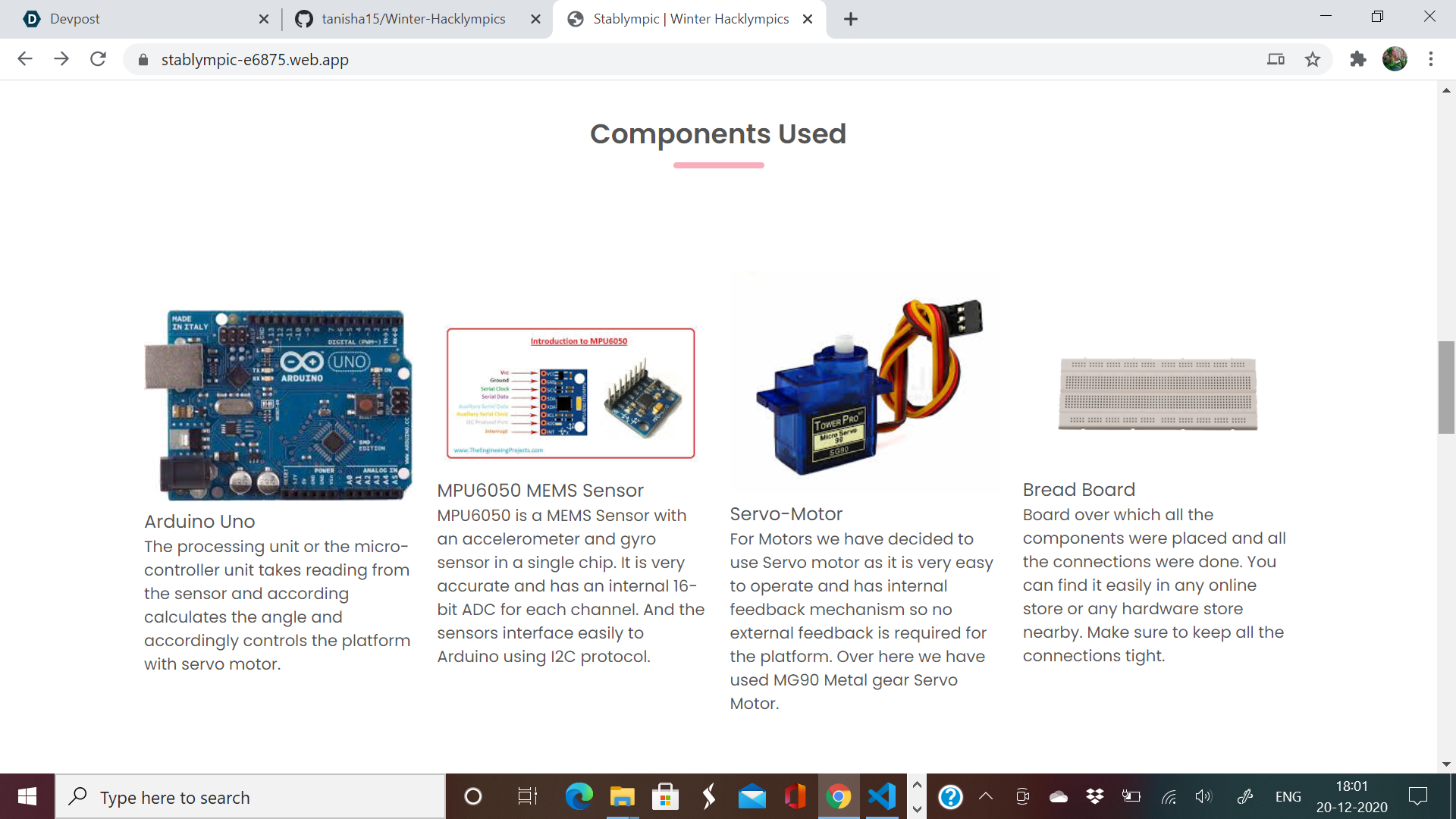
components used
-
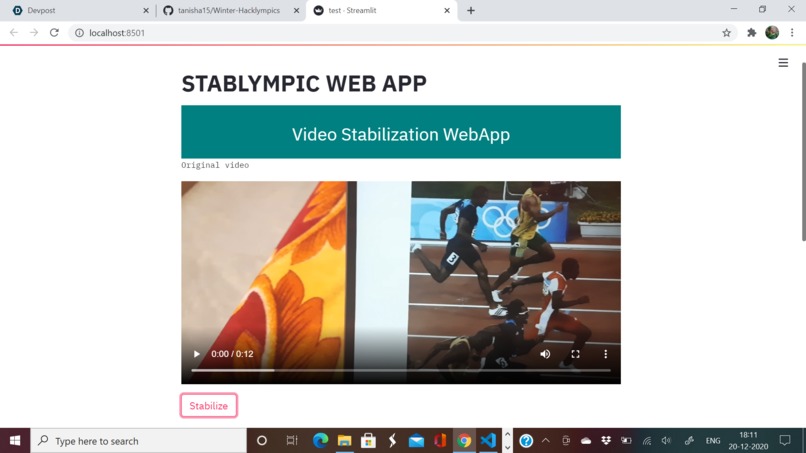
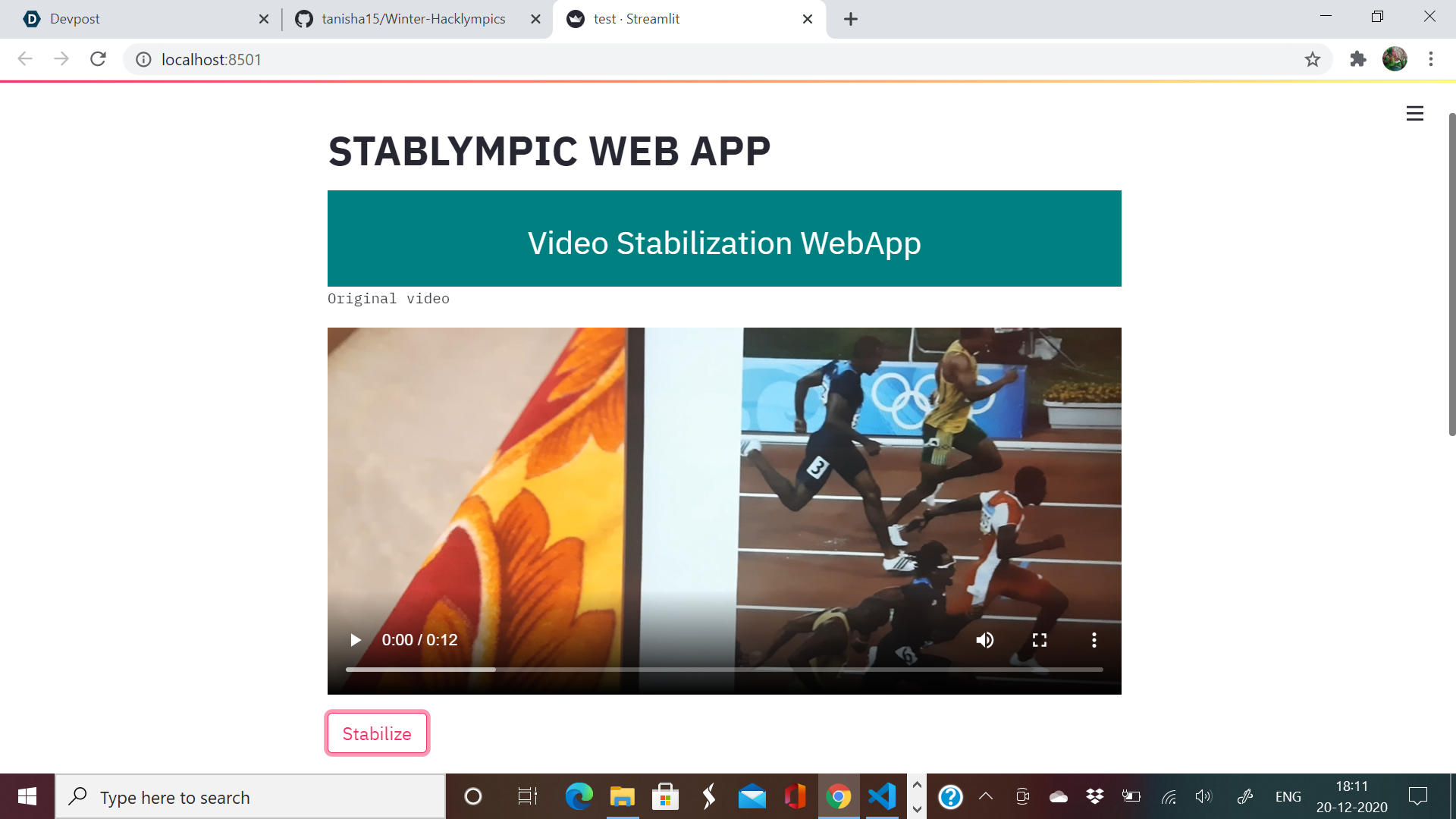
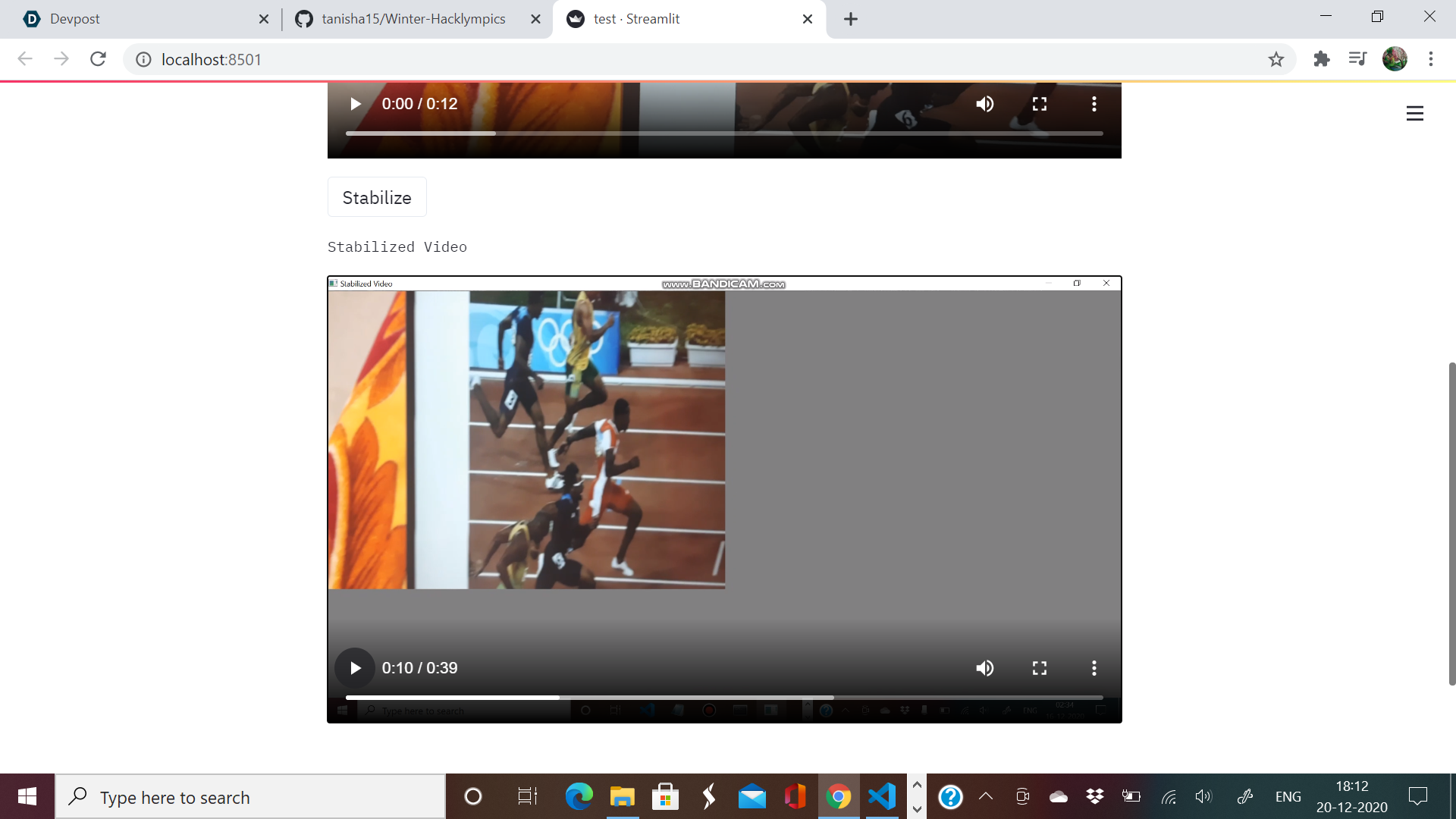
Stablympic web app- original video
-
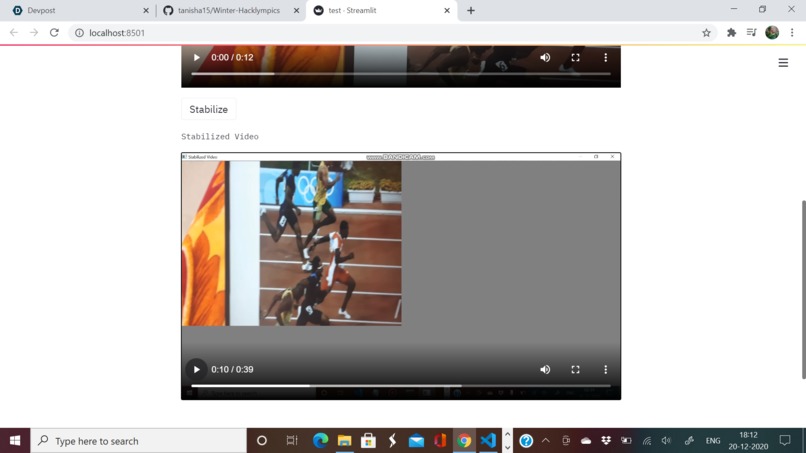
Stabilized video



Inspiration
The inspiration we got was that during olympics or any sports events, videos of the athletes need to be recorded properly. These videos are mostly in motion and therefore can turn out to be hazy if recorded with just the simple camera and also its quite hard to keep the video stable. It can get jerky. Therefore, this self stabilizing platform solves that problem by automatically adjusting camera or any other object and balancing it out to give a more stabilized video.
What it does
The project uses PID to obtain filtered values regarding the position of the accelerometer/gyroscope(MPU6050) as feedback which it then uses to remain in the calibrated position despite a displacement. Servo motors have been programmed to obey the microcontroller based on the feedback received from the gyroscope. The output that we get is a more stabilized video. It can also be used for various other purposes like surgery platforms, making anti-motion sickness seats in vehicles, and building earthquake proof buildings. In here, our project stabilizes the camera on the platform automatically and balances it out to give us a more stabilized video.
How we built it
Hardware Requirements:
- Arduino-Uno- This is the basic microcontroller used in our hardware and the coding has been done in the ARDUINO IDE platform.
- MPU6050MEMS Sensor - It contains both gyro sensor and accelerometer embedded on a single chip and is also very accurate.
- Servomotor - Used for the motion of the platform on which the object is kept.
- Kalman-Filter- Kalman filter is used to optimally estimate the variables of interest when they cant be measured directly. They are also used to find the best estimate of states by combining measurements from various sensors in presence of noise.
Software Requirements:
1.Computer-Vision- It is an artificial intelligence package of python.
2.Streamlit- Used this python package to host our webapp.
Used HTML, CSS to make the website featuring the project we made with all the details about the components used, results obtained and uses of the platform.
GoogleFirebase - We used firebase platform of google to host our website.
Challenges we ran into
We faced challenges with the Kalman Filter to rectify the errors that we encountered in the Arduino code. And also faced some challenge to write the python code using the OpenCV package of python.
Accomplishments that we're proud of
We are proud that we stuck to the theme and were able to utilize our weekend in a fruitful way! The platform is cheaper than the other high expense ideas and using only a few basic components we were able to implement it successfully. Hope you liked our project! :)
What we learned
Got to learn a lot about coding in Arduino IDE, how to make connections using MPU6050, arduino uno board and servomotor. We learnt about python coding using opencv, numpy, streamlit packages of python. We also learnt frontend development by making a website for our product using HTML and CSS. We learnt how to host a website using Google Firebase. Loved working on the project!
What's next for Stablympic
The need for stabilizing mechanisms is wide-spread. Various techniques are applied in search of the ideal solution. A common application is camera stabilization, less common are perhaps self-leveling anti-motion sickness seats or surgery platforms. It can be deployed on a wider scale and more can be implemented in the circuitry! Looking for ways to advance it further.

Log in or sign up for Devpost to join the conversation.