-

R-Cubed Side View
-

R-Cubed
-
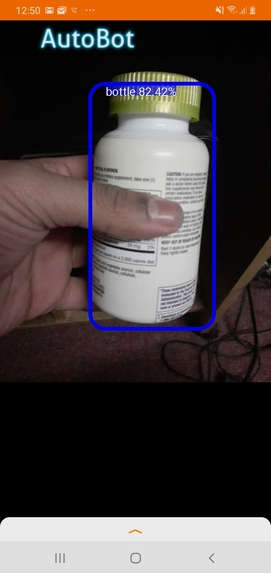
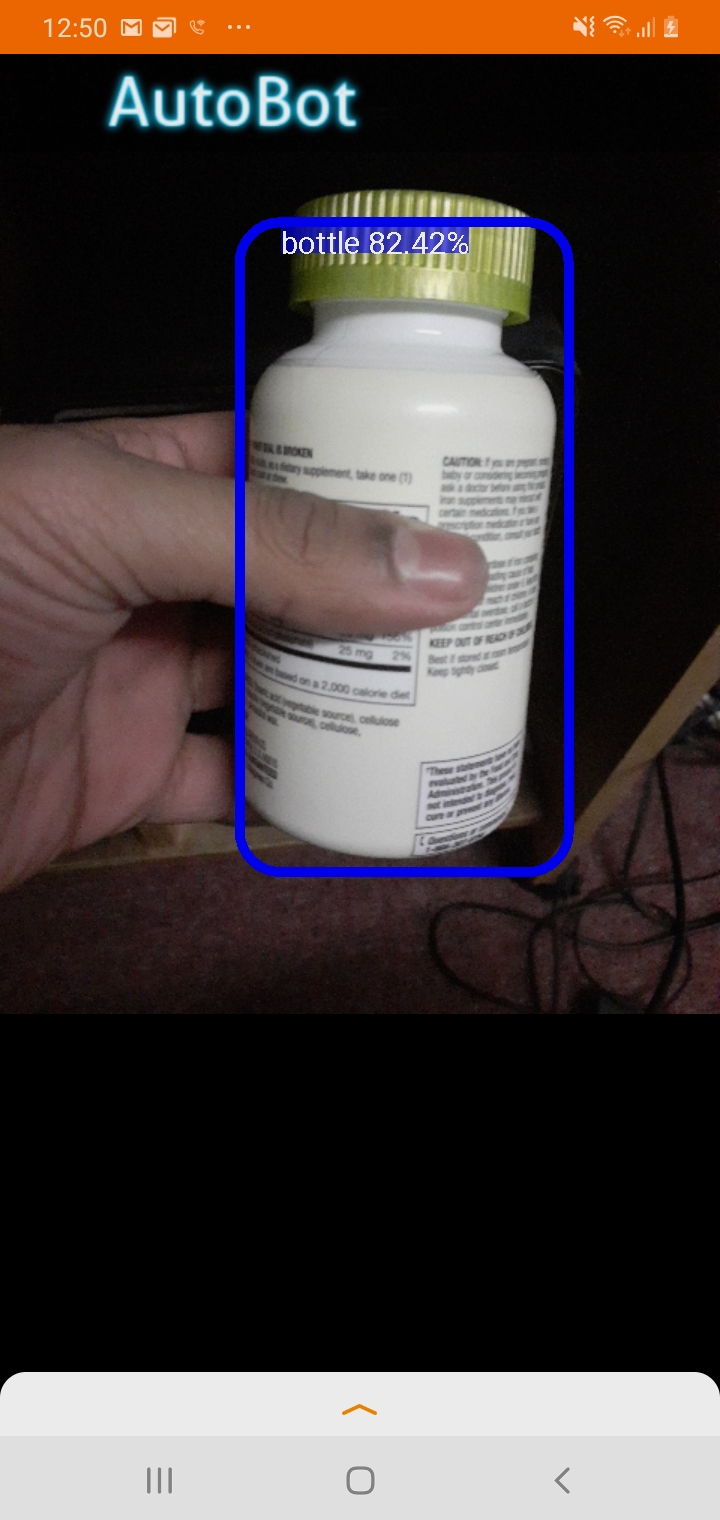
App Image Detection
-
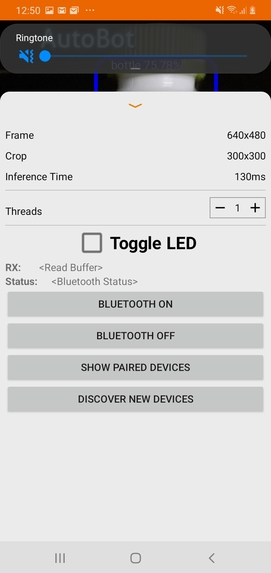
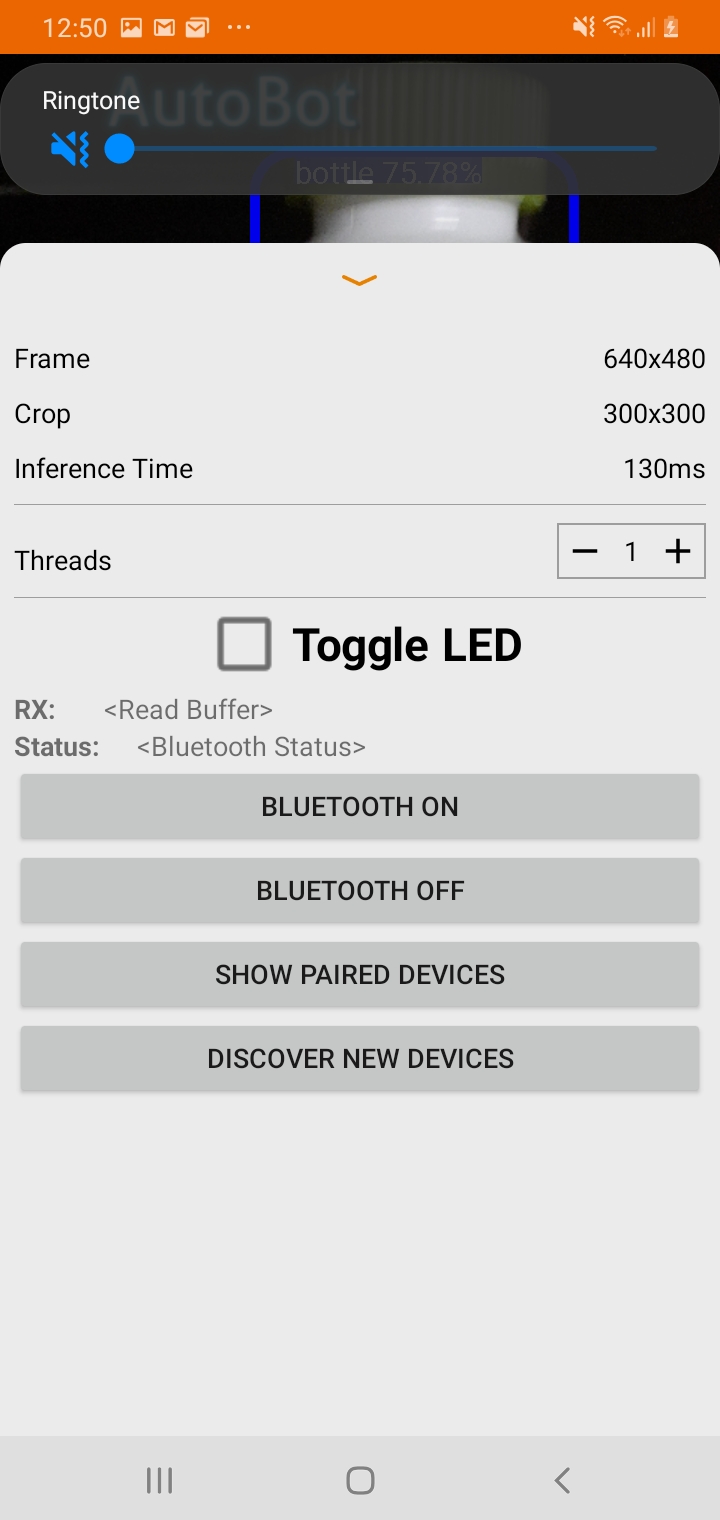
App Bluetooth Stream
-

The "R-Cubed" Team



Inspiration
Growing up in New York, our team has seen the ups and downs of the entire city. While we walk through the different boroughs and explore it has to offer, there remains one thing they all have in common, the trash. Plastic bottles, paper cups, and metal cans rule our subway stations and street corners. Yet all of this stuff is perfectly recyclable. We realized it would be an immense job to clean up each piece hand by hand but what if we had something that did it for us? Thus the R-Cubed was born! The R-Cubed could pick up and sort through materials to recycle them through the proper bins. With its rover treads, it can travel over different terrains, allowing it to be able to drive through all sorts of places. No longer will people be fined for disorganizing their recycling or will be faced with a wave of trash as they step out their house. The R-Cubed is here to clean up the Earth, once piece at a time!
What it does
R-Cubed is a robot that can sort through different types of trash and recycle them based on materials. It them based on which material the user is looking for. The user opens an app that connects to R-Cubed and they select which material they want to recycle (for example plastic or paper) and R-Cubed is able to seek it out and pick it up. Using a sprocket system and tank like tracks, its able to drive to materials and store them in its removable containment unit.
How we built it
Using an Arduino bluetooth module, R-Cubed is able to connect to your phone through an app to autonomously recycle and pick up trash. Utilizing TenserFlow and an app written with Android Studio, a camera scans the environment and seeks out what the user wants to sort though. The more R-Cubed is used, the more precise its machine learning algorithm gets to detect materials. Rover style wheel treads are connected to gearbox motors to give them the ability to travel over a variety of terrains. With sprockets and rubber bands combined to intake materials, it sucks in the object and brings it to the storage unit made out of wood. Laser cutting lightweight wood and 3D printing various components, its lightweight and able to be driven by two gearbox motors.
Challenges we ran into
We ran into many challenges with the code. Initially we wanted to detect materials using Open CV. However after much trial and error, we realized that for our purposes, it would be more beneficial to use TensorFlow. However we were under a time crunch with manufacturing our own pieces and needing to produce them to the right dimensions. At times, our calculations were off, meaning we had to start over and fix our mistakes to ensure R-Cubed was functional.
Accomplishments that we're proud of
We are proud of being able to create an app that utilizes TenserFlow to scan and recognize items. This app sends information to the Arduino and tells it which direction to turn the robots motors so that it can intake the material. We are also proud of being able to CAD our needed parts and combine them into one robot.
What we learned
One of the major things we learned with the software was utilizing TensorFlow and connecting a bluetooth module with an Arduino to send material from our phones to the Arduino itself. With Android Studio, we developed a functional bluetooth app and that was a huge factor in determining the functionality of R-Cubed
What's next for R-Cubed
While Rome may not have been built in a day, R-Cubed sure was. The potential of where it can go from here is endless. We would want to further optimize R-Cubed's design to allow for a greater storage hold. In addition, we would want to train the machine learning algorithm further to be able to recognize materials with increased accuracy. R-Cubed could be used to clean up beaches, sidewalks, or even just sort through your recycling when you dont have a chance too. In order to maximize its benefit to the environment, R-Cubed could be created out of recycled material to ensure that its doing its job of giving back to the Earth. After all, its the only planet we have to share.
Built With
- android-studio
- arduino
- bluetooth
- fusion
- solidworks
- tensorflow

Log in or sign up for Devpost to join the conversation.