-
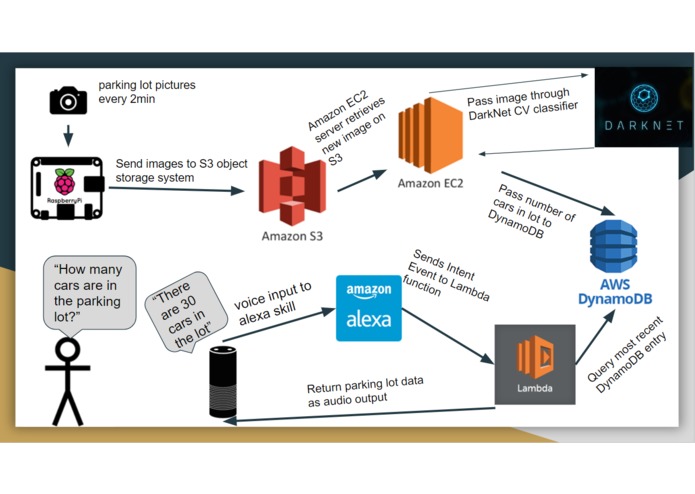
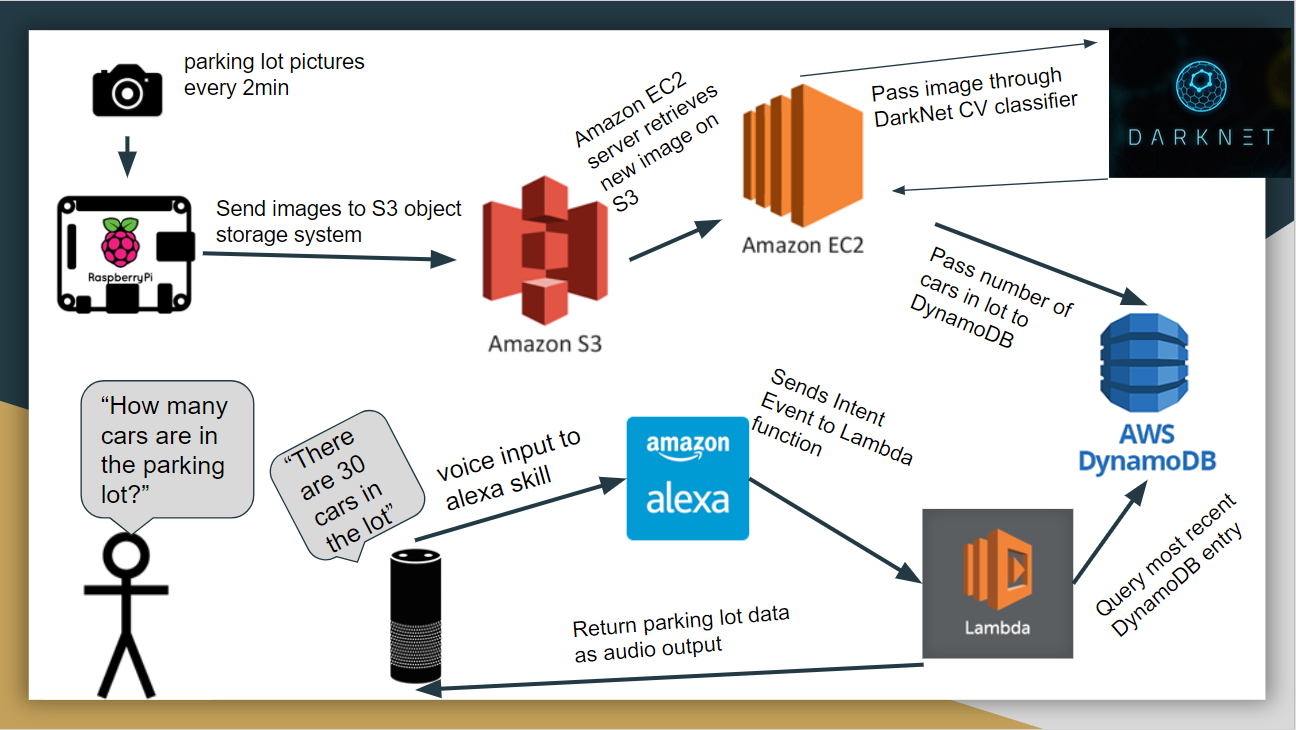
Parking Pi
-
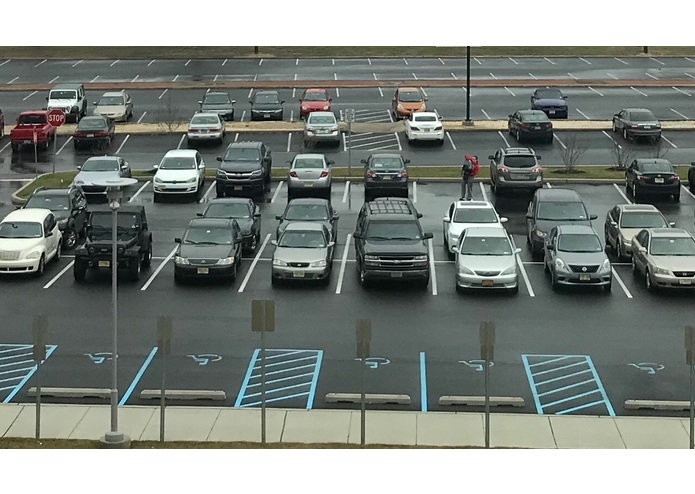
Original Pi Image
-
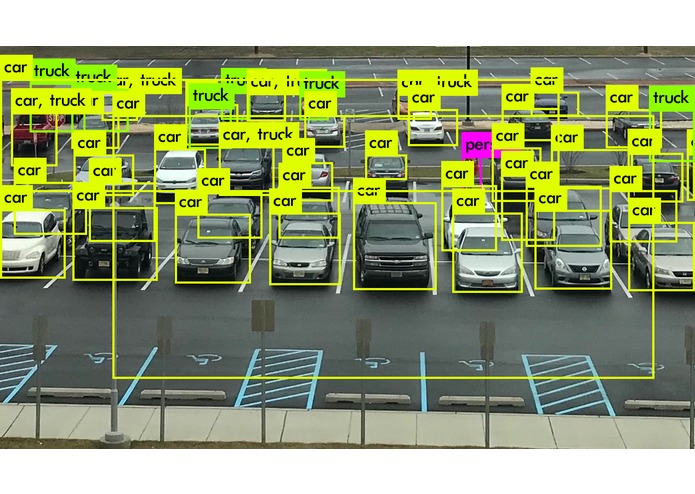
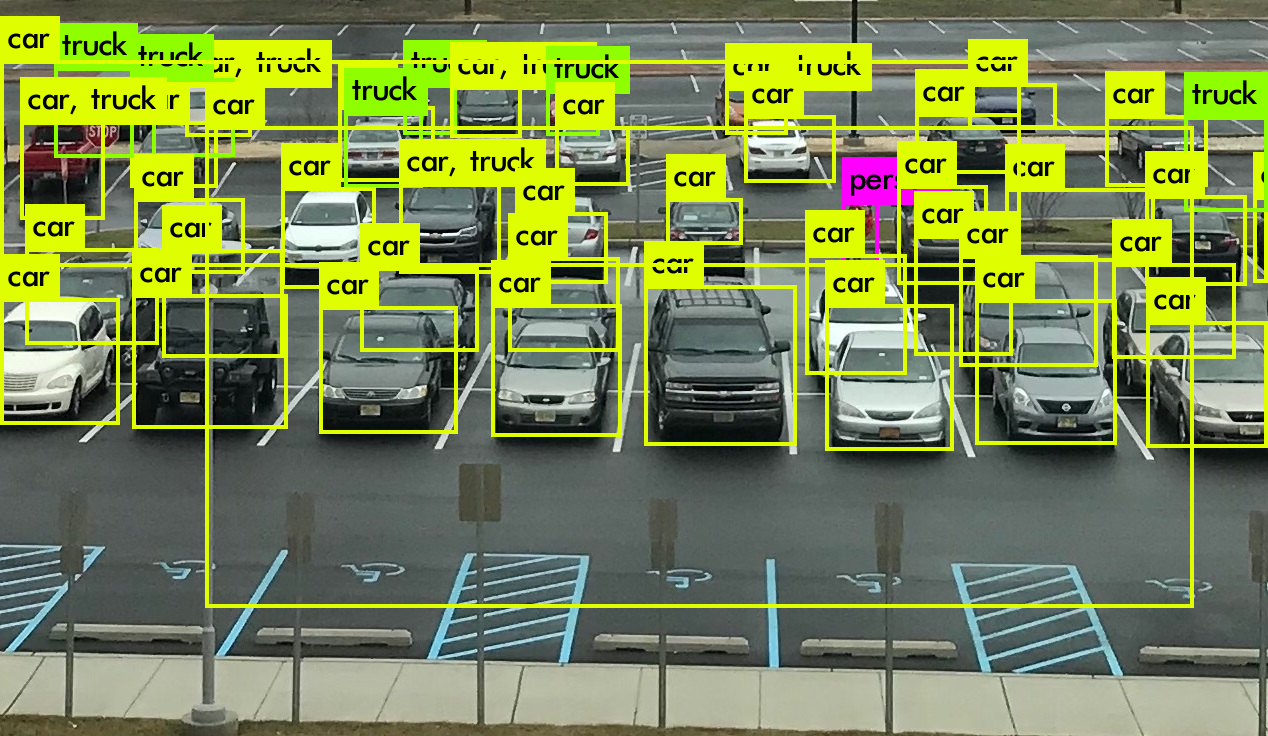
Darknet Boundary Detection
-
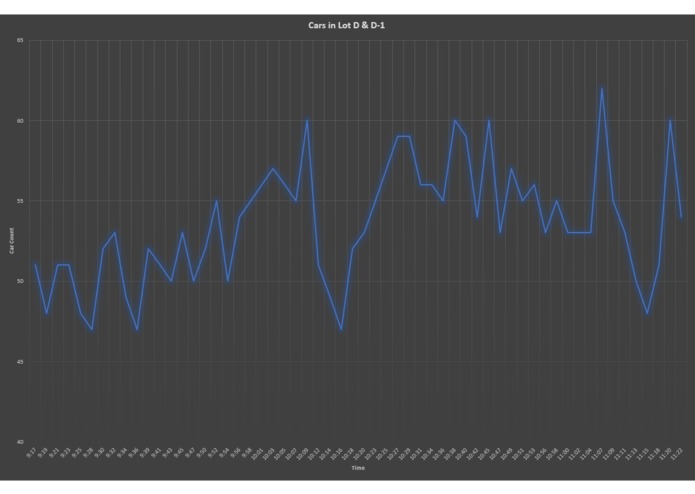
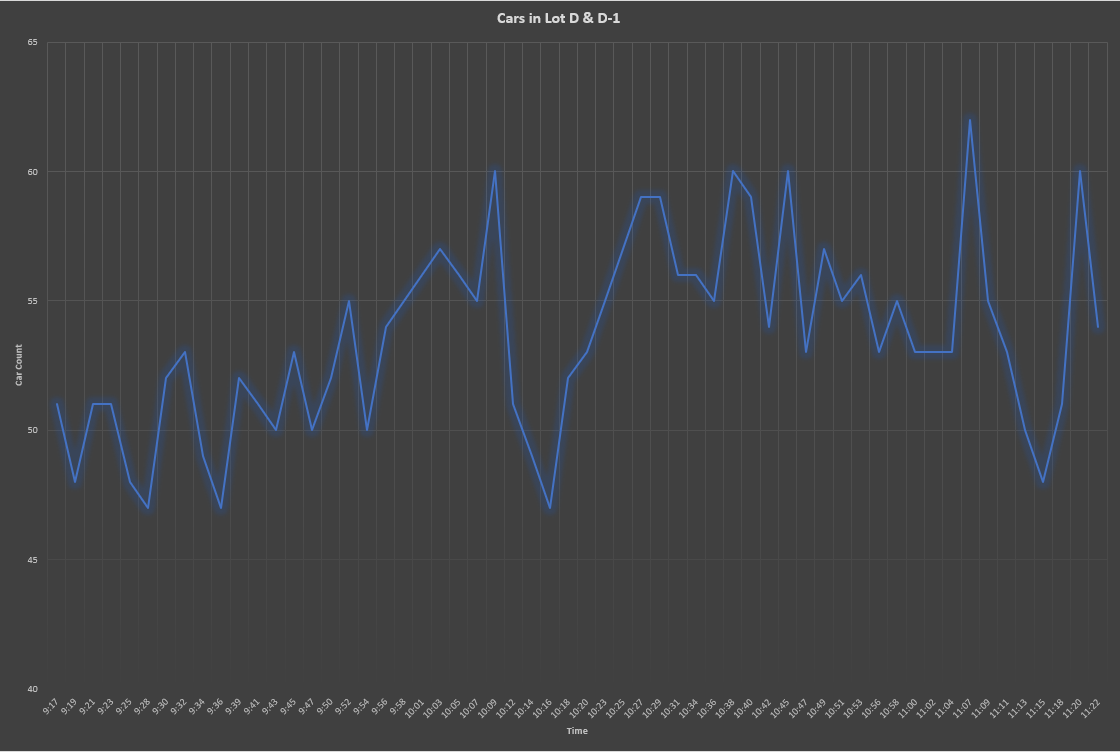
Data Visualization

Inspiration
The idea of a parking lot status tracking system emerged from the parking issues that students and faculty often encounter in the Glassboro area. By creating a monitoring system that can easily be setup to track any parking lot, it offers logged real time data tracking that can be used to inform long term decisions made by municipalities and large organizations such as Universities. These business can then decide whether they should build on existing parking lot space or increase the size of the parking lot space to ensure they are efficiently giving value to customers.
What it does
A Raspberry Pi with a camera peripheral captures an image on a defined variable time interval. These images are then uploaded into Amazon's S3 bucket. From here a virtual Linux machine running on Amazon EC2 pulls the images from Amazon S3 and passes them through the DarkNet computer vision algorithm for image boundary detection. The output of this boundary detection is then parsed for the number of car instances that met the defined threshold. This car count value is stored in DynamoDB until it is requested through use of an Amazon Alexa Skill.
Challenges we ran into
AWS Rekognition CV not working as planned Unable to get an Amazon Lambda function to properly communicate to the ec2 in the VPC Ran into difficulties manipulating data in a no sequel database (NoSQL) such as Dynamodb
What's next for ParkingPi
Train darknet CV algorithm for our specific use: Because we are using a machine learning neural network with more time, processing power, and a dataset of parking images the algorithm could be trained to more effectively and accurately determine the number of cars in a parking lot from the ideal camera angle that is chosen. For example our cameras would ideally be mounted above the parking lot on lamp posts with a top-down view of the vehicles in the lot. This angle and distance could then be used to train the algorithm to excel in accurately and consistency identifying cars from this specific point of view.





Log in or sign up for Devpost to join the conversation.