-

NVIDIA Jetson TX2
-
-

Inspiration
04 Hack a real car: an unparalleled opportunity to solve a real life problem with the use of up-to-date and high-profile hardware platform.
What it does
It drives autonomously.
How we built it
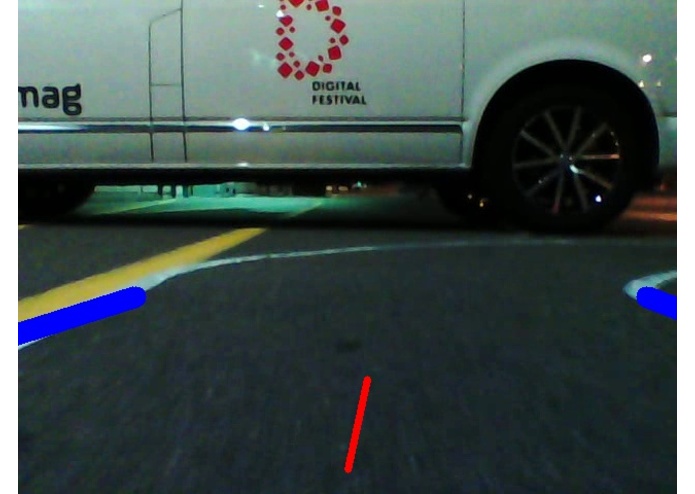
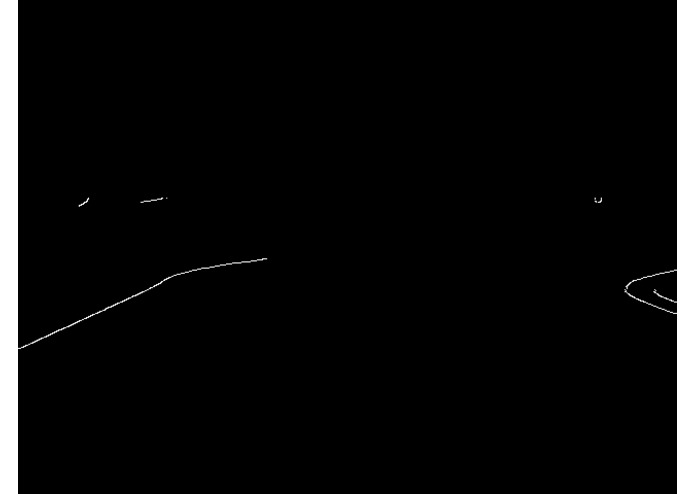
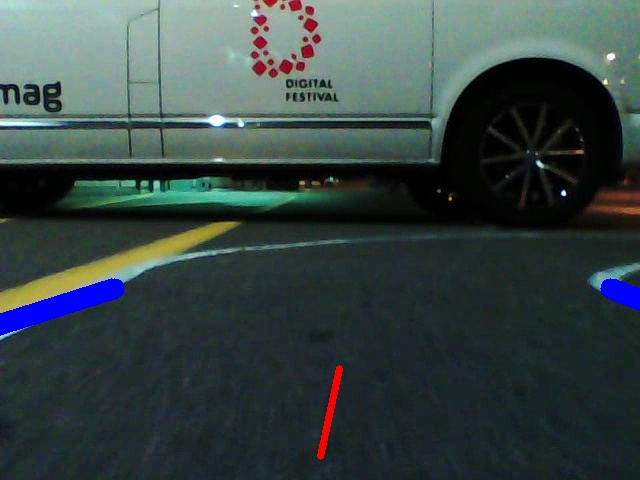
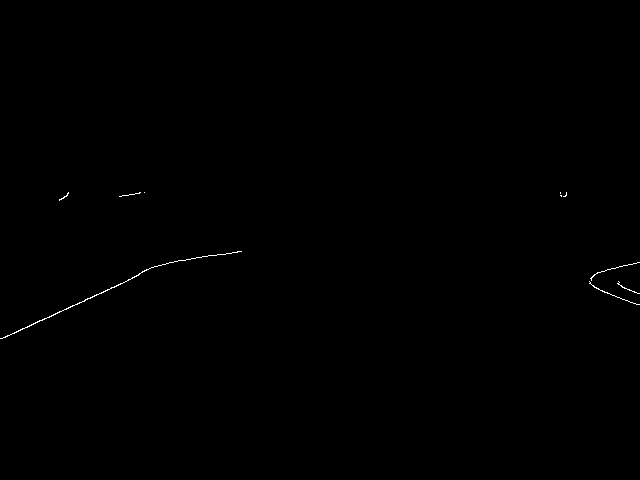
We used the NVIDIA JETSON TX2 platform along with OpenCV in order to process the view from the camera and create control data for the car. We tested the system using a toy car and simulation.
Challenges we ran into
NVIDIA JETSON TX2 required a little bit of effort to get it up and running. Of course we encountered typical problems connected with robotics and combining computer science with mechanics.
Accomplishments that we're proud of
We managed to drive autonomously in the simulation environment that shows that we are capable of scaling our approach to real vehicles.
What we learned
We improved our knowledge in image processing algorithms, decision making schemes and we are now a lot more familiar with the challenges connected with developing software on GPU based systems.
What's next for KeepCalmAndLetTheCarDrive
The next level is to improve the accuracy of the algorithms and port the solution to a real-size car.
Blog-Post:
https://autoblog.amag.ch/programmieren-heisst-schnell-reagieren/




Log in or sign up for Devpost to join the conversation.