-
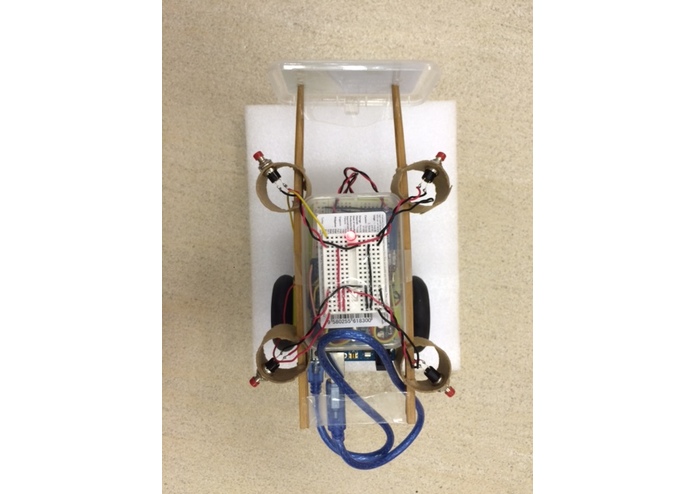
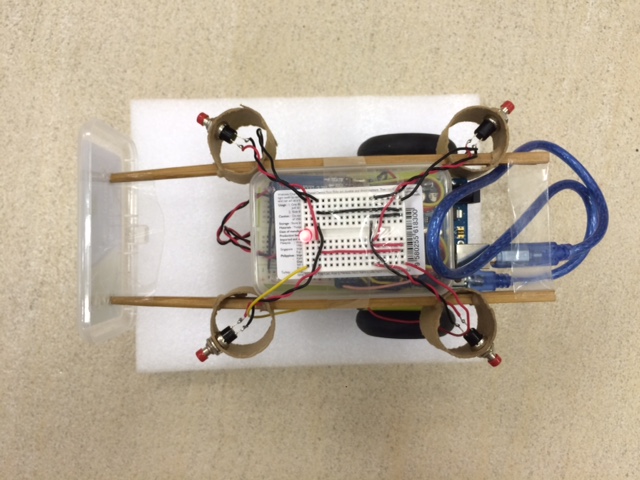
Top View
-
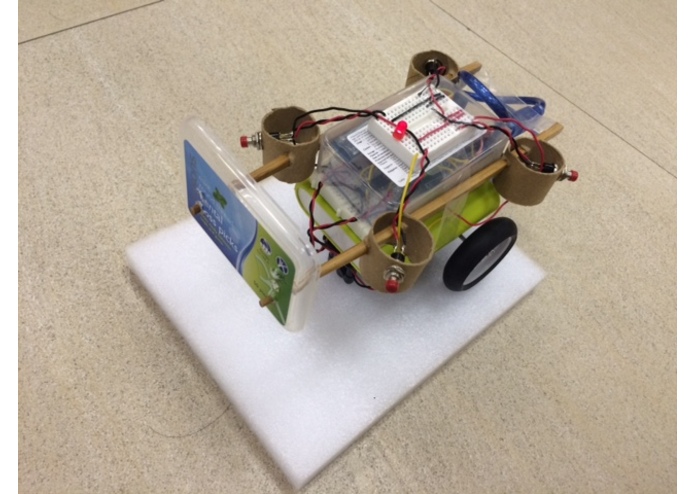
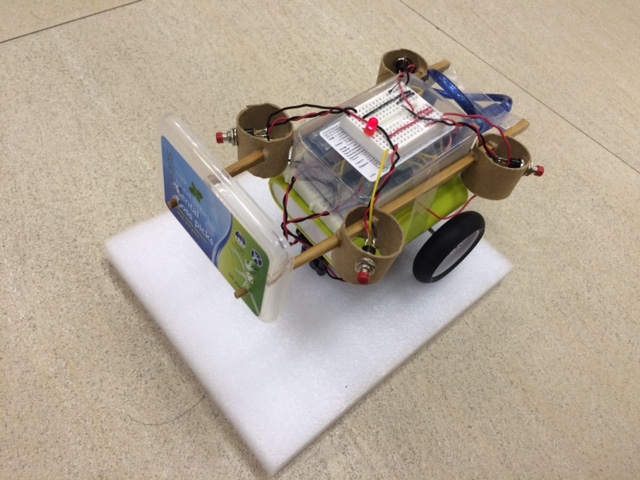
Diagonal View
-
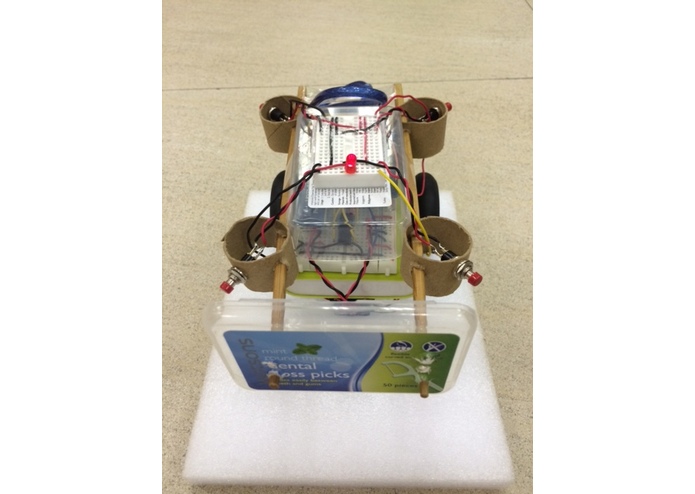
Back View
-
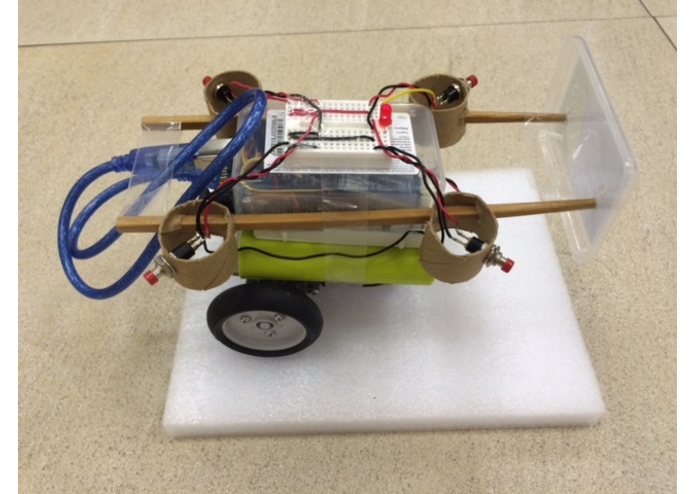
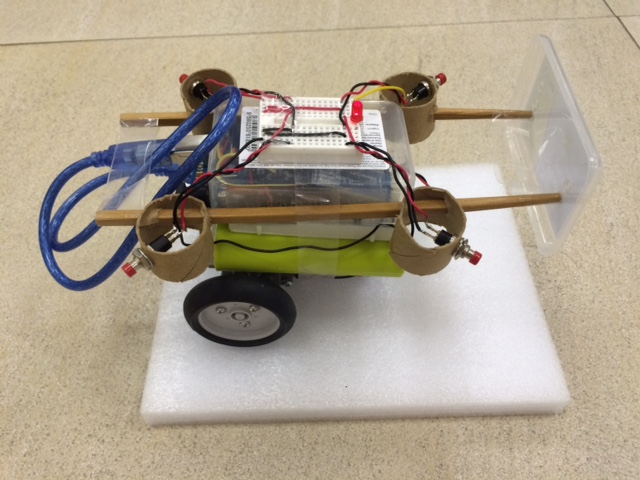
Side View
-
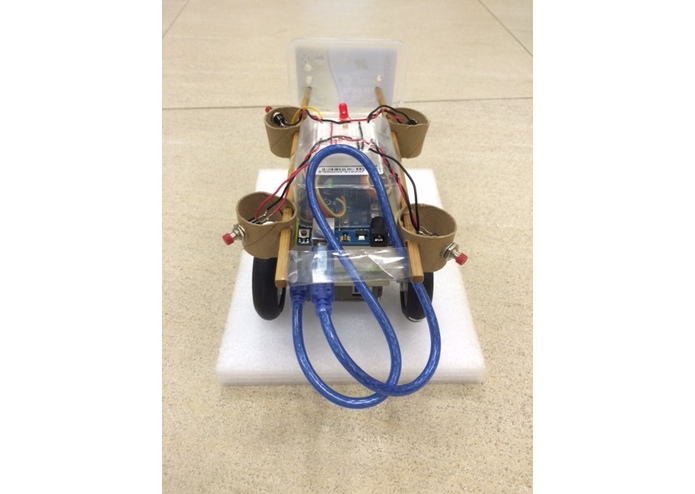
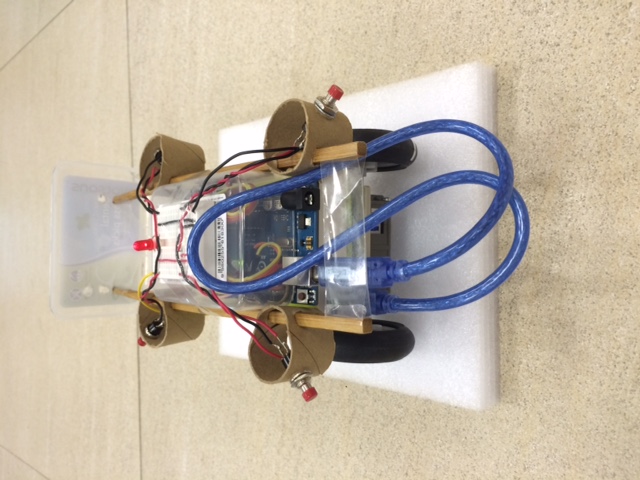
Front View
-
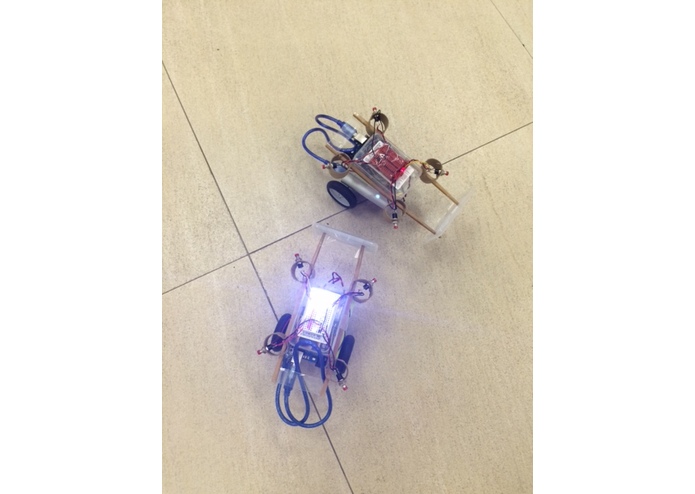
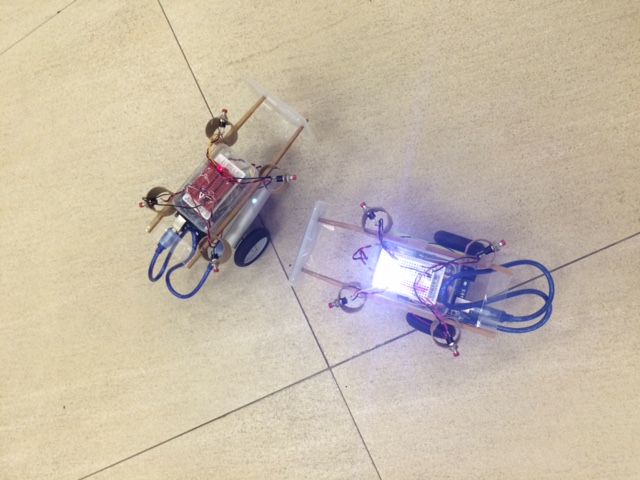
Battle in Progress

Inspiration
We wanted to make something like Crush Gear, a childhood toy/game where players use robotic cars to battle.
What it does
Two players control an Arduino car wirelessly through separate laptops. Each car has 4 buttons on each side, which will cause it to shut down when triggered. Each player has to strategically maneuver their car and use the shield in front to ram into the enemy car's weak spot (buttons) and disable their car before their own car gets disabled.
How I built it
We used an Arduino to serve as the main control of each car. The Arduino is connected to a wireless bluetooth receiver, which takes inputs from a laptop and moves accordingly.
Attached on each car are four push-buttons, which send a signal to the Arduino when it detects a press. Once it does, the car goes into a shut-down mode where it is unable to move.
Challenges I ran into
We initially wanted to make a punching mechanic where the player has to press a button to fire a "punch" or bullet from the car towards the opponent. However, we soon realized that this mechanic was more complicated than planned and we did not have sufficient time to devise two prototypes for the cars (one each).
Eventually, we changed that mechanic by integrating it into the movement of the car. By attaching a shield at the front of each car, we can turn the forward movement of the car into a "ramming" attack.
Accomplishments that I'm proud of
We managed to make a sturdy hit-detection mechanic (four push-buttons) that is reliable even after multiple hits. Also, we managed to figure out how to connect the Arduino wirelessly via Bluetooth. Seeing your robot move via wireless commands is creepy yet fascinating at the same time.
What I learned
Controlling the Arduino via bluetooth. More electric circuitry skills as we had to set up a breadboard which held the controls and detection mechanisms to link up with the Arduino via pull-down networks.
What's next for Crashmi
Cars crashin' and adrenaline pumpin'! Come to our booth for robo-fun!
Built With
- arduino
- pushbuttons
- tamiya
- xiaomi




Log in or sign up for Devpost to join the conversation.