-
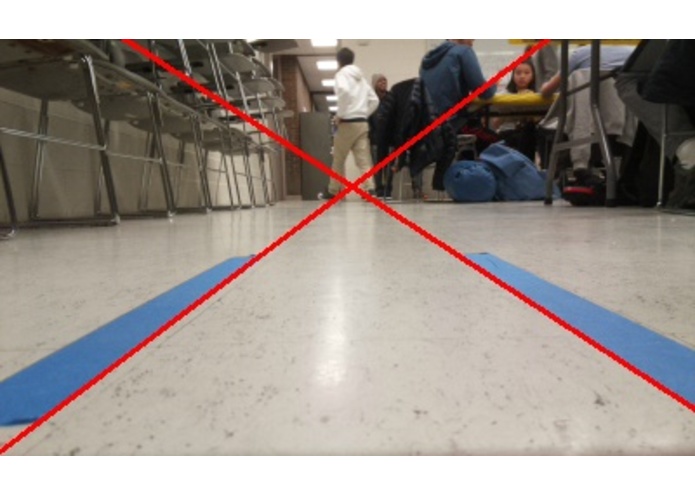
Computer vision detects the lane markings.
-
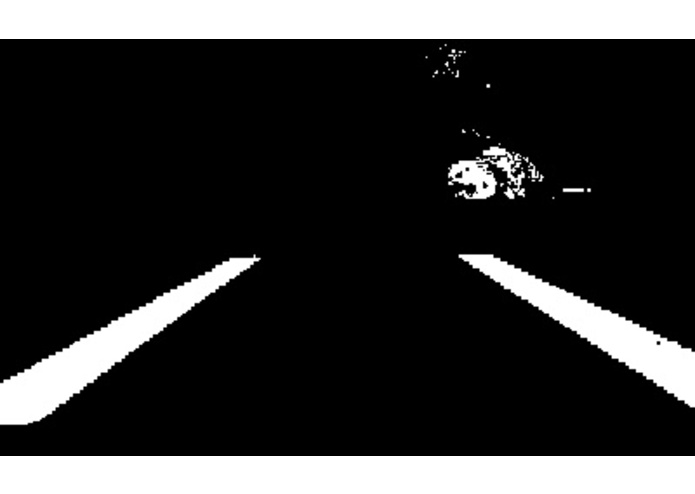
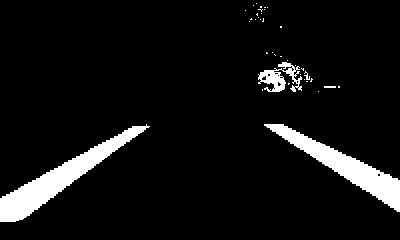
Lanes clearly shown (two white strips).
-
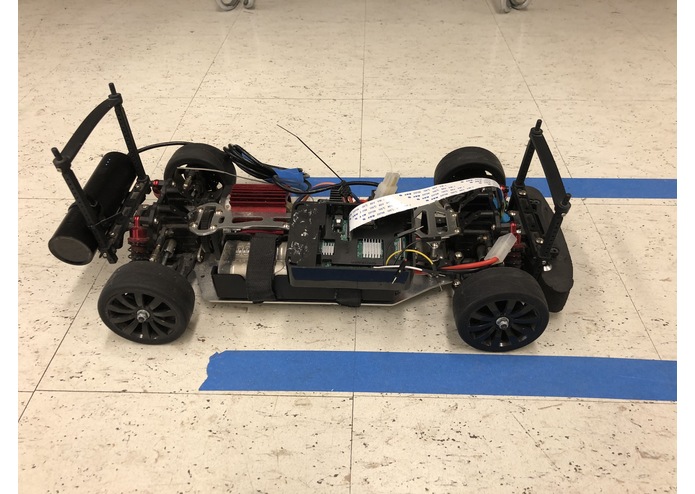
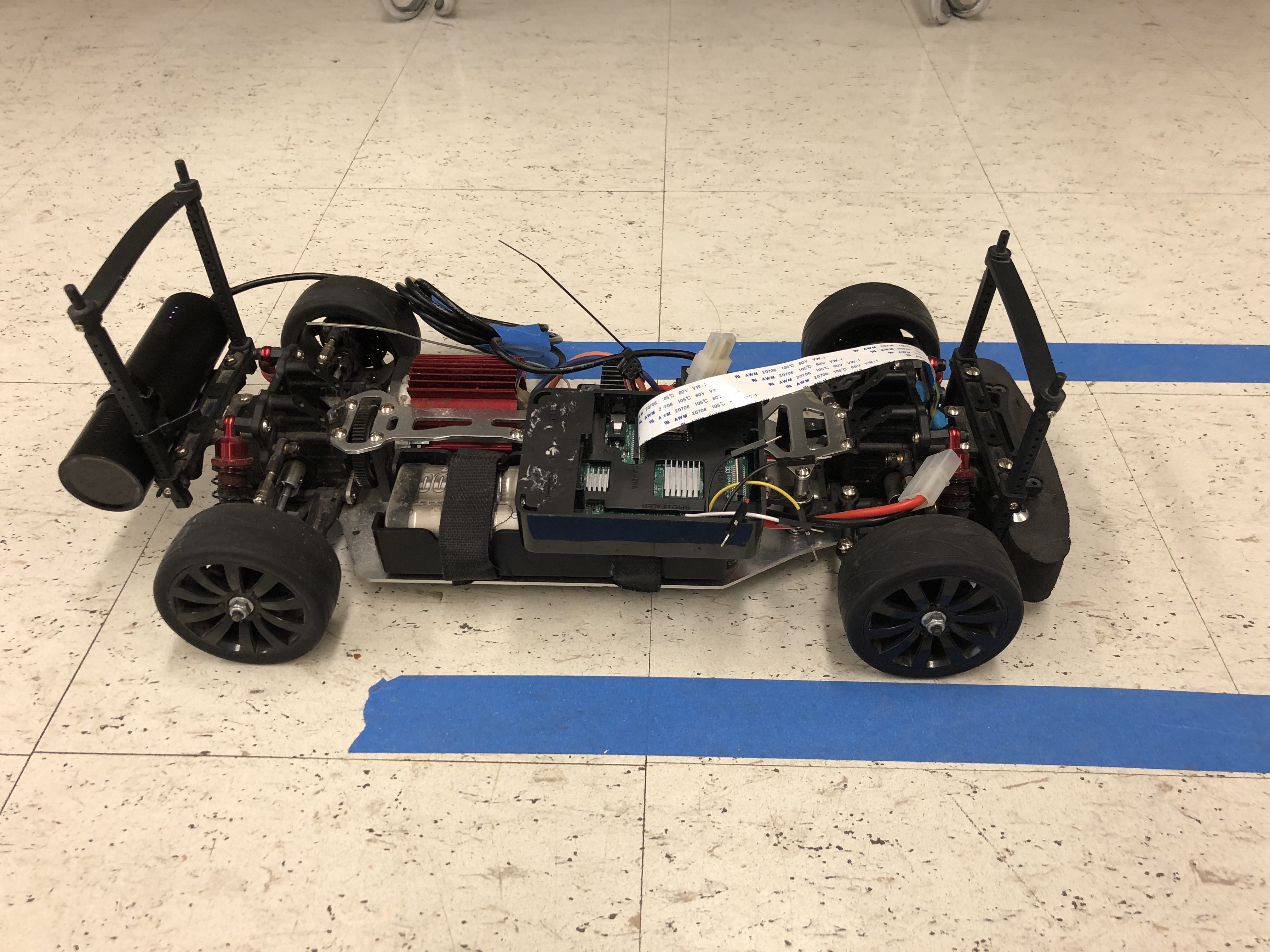
The car shown on the lane markings.

Inspiration
Our inspiration for developing this project was the recent work done on autonomous vehicles, such as by Tesla. We hoped to create a system that could follow tape lane markings similarly to how a self-driving car must follow lane markings. We believe that our technology could be applied to autonomous vehicles to help them steer. Furthermore, we utilized a neural net to detect stop signs, allowing the car to stop in much the same way a real car should.
Methodology
We used a car mounted with a Raspberry Pi and a front-facing camera. We wrote our code using Python. For detecting the lane markings, we used the computer vision library OpenCV. To detect stop signs, we used a neural net implemented through OpenCV DNN. All of the code runs locally on the Raspberry Pi without user input.




Log in or sign up for Devpost to join the conversation.