-
-

-
-
WaterStorage
-


INSPIRATION
The inspiration behind this project comes from our desire for a sustainable and efficient future. With the introduction of AgroPicasso, we can encourage the involvement of more technology in the agricultural field to make tedious tasks in the agricultural sector more efficient.
DESIGN
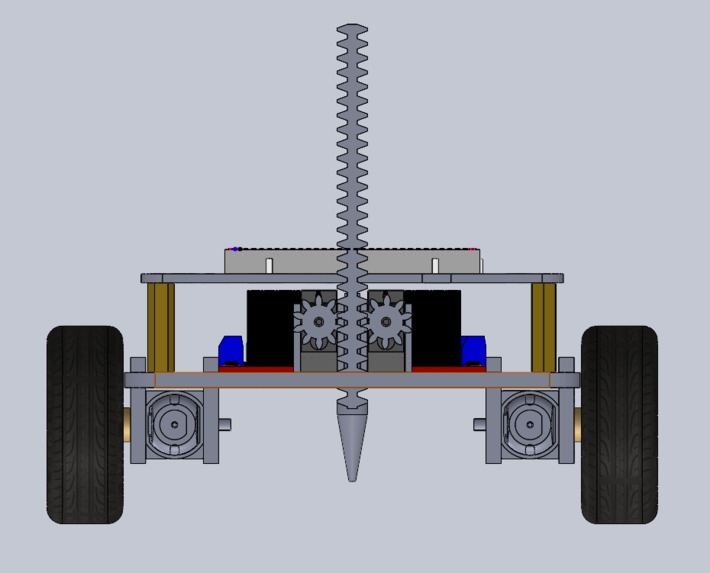
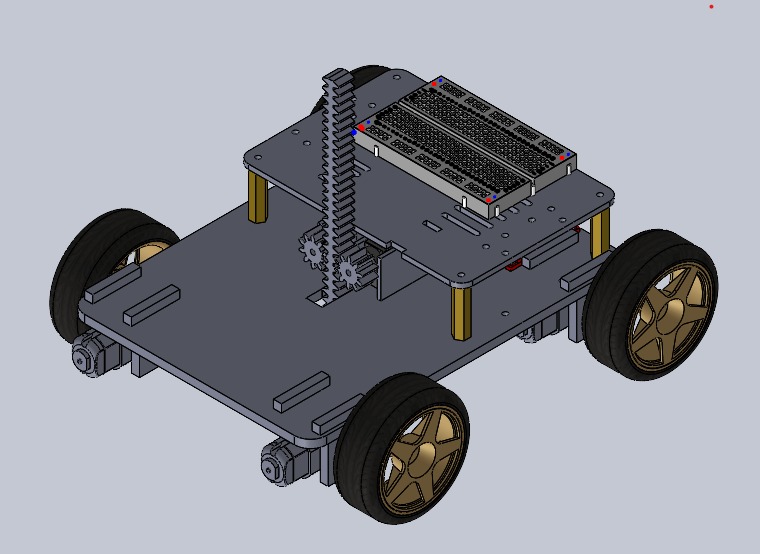
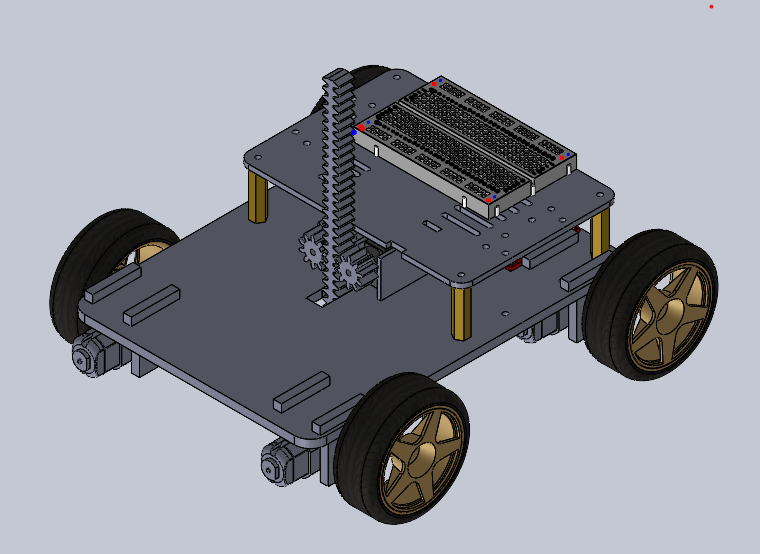
AgroPicasso is able to take the greyscale image given, convert that image into coordinates, and traverse around to create that image by dropping seeds at the exact coordinates.
We designed the chassis and all other necessary mechanisms for the bot by leveraging Solid Works. We used Arduino Uno, and coded in C-based programs to run AgroPicasso.
CHALLENGES
The biggest problem was we faced was deciding the mechanism for digging given the limited parts. We also did not have access to 3D printers, therefore, were not able to manufacture AgroPicasso.
SUCCESS
Our biggest accomplishment through this Hack is the water releasing mechanism where we leveraged a magnet and gravitational force to control the flow of water.
We learned how to work with image processing and designing Rack and Pinion gear in Solidworks.
MOVING FORWARD
Our team's next goal is to actually manufacture a prototype of AgroPicasso and build a user-friendly interface to control AgroPicasso.
Built With
- arduino
- c++
- imagemagick
- powershell
- solidworks


Log in or sign up for Devpost to join the conversation.