-

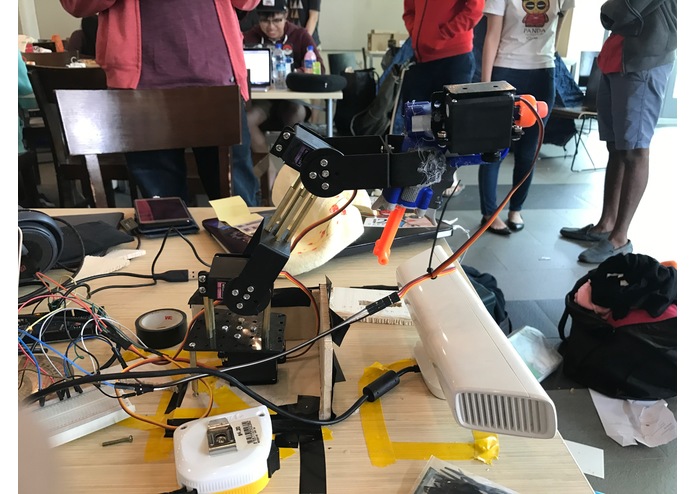
Toy pistol attached to robotic arm
-

Front view with Kinect
-

Toy pistol with its bullet
-
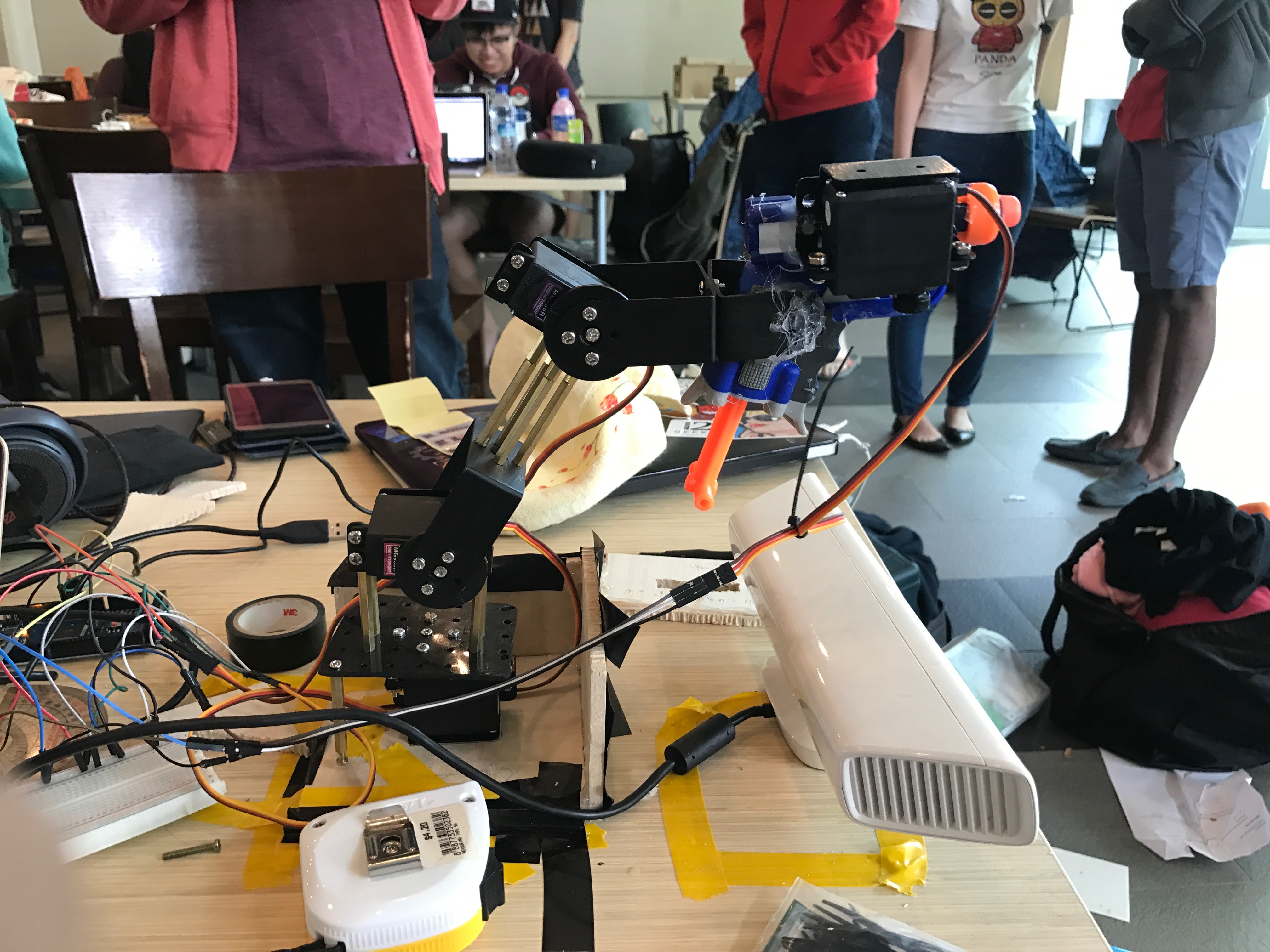
Side view of our whole robotic arm with Kinect


Inspiration
Inspired by our interest in the applications of the Kinect sensor and its tracking abilities
What it does
It uses the Kinect to receive the coordinates of a target. The coordinates are then processed to make the robotic arm that is fitted with a toy pistol aim at the target. Finally, a press of a button releases the bullet.
How we built it
The robotic arm - multiple servos as well as servo brackets (all assembled by us) The toy pistol - A high pressure, yet compact toy gun The base of the robotic arm - Using wood that was cut by us as well as a servo bracket Extra note: Programming was entirely done by us (using the OpenNI library)
Challenges we ran into
The processing of coordinates obtained from the Kinect sensor was especially tough. It also took as a long time to calibrate the sensor for our purpose.
Accomplishments that we're proud of
Finally finishing and stabilizing the robotic arm was a triumph moment for our team. We were also happy that we were able to incorporate the OpenNI's user ID function for detection!
What we learned
We learnt that dividing tasks efficiently amongst the team in accordance to each person's strengths was vital to the speedy completion of our robotic sharpshooter. We also learnt that things like 3D axes and programming such values with mathematical skills are never beyond our capability. All we need is perseverance.
Built With
- arduino
- c++
- firmata
- java
- nite
- openni
- processing


Log in or sign up for Devpost to join the conversation.